- Una nova pell electrònica neuromòrfica permet als robots detectar tacte, danys i activar reflexos ràpids similars al dolor.
- L'arquitectura inspirada en el sistema nerviós humà evita passar sempre per la CPU i millora la seguretat i la velocitat de reacció.
- El sistema ja s'ha provat en robots humanoides i obre la porta a millors pròtesis, exoesquelets i robots de servei.
- L'ús del terme “dolor” en màquines planteja debats ètics i de llenguatge, encara que els robots no tinguin emocions.

La robòtica fa un pas cridaner amb l'arribada d'una nova generació de pell electrònica capaç de dotar les màquines d'un sistema d'alerta semblant al dolor humà. No es tracta de fer patir els robots, sinó de donar-los un senyal clar i rapidíssim que alguna cosa va malament per evitar avaries i comportaments perillosos quan treballen a prop de persones.
En els últims mesos, diversos equips de recerca a Àsia han presentat prototips de “e-skin” neuromòrfica o pell neuroelectrònica dissenyats per a robots humanoides i de servei. Aquestes solucions reprodueixen, fins a cert punt, la lògica del sistema nerviós: detecten el tacte, reconeixen quan un estímul pot causar dany i desencadenen reflexos instintius sense dependre sempre d'un “cervell” central lent.
Què vol dir que un robot pugui sentir una cosa semblant al «dolor»
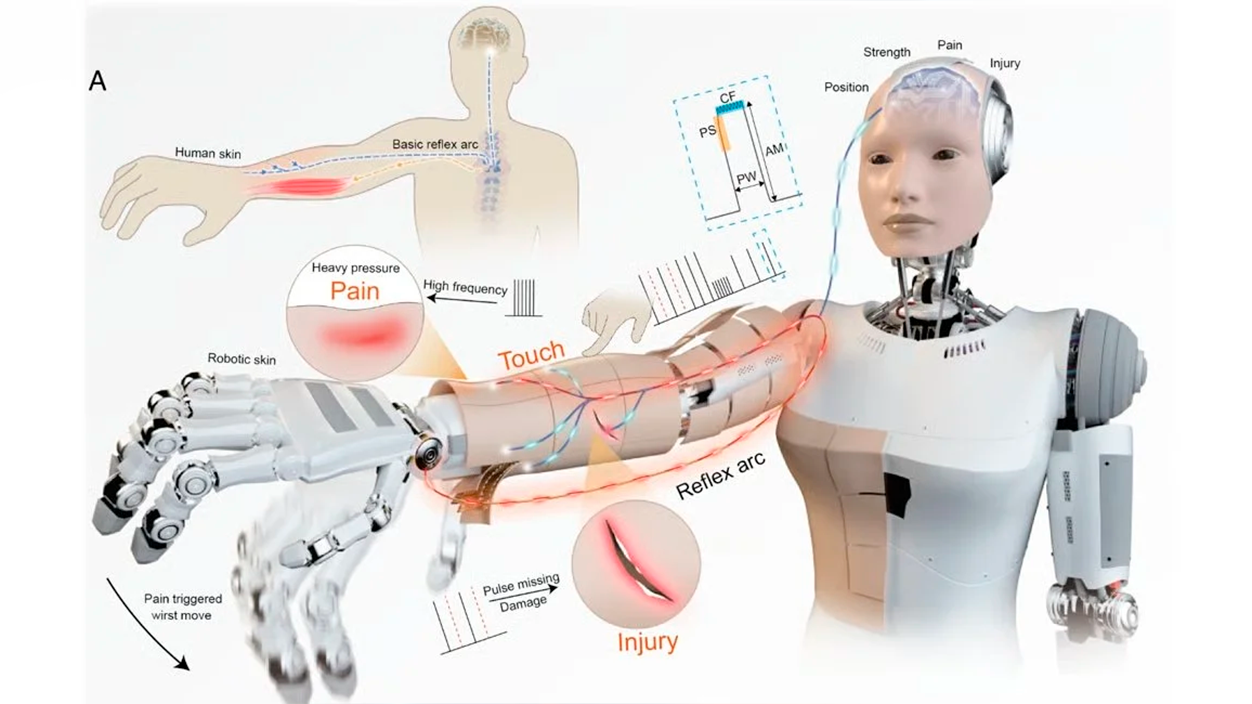
Al laboratori, els investigadors parlen de centres de “dolor” i estímuls perillosos per descriure com respon aquesta pell artificial a situacions com calor excessiva, punxades, cops o pressions massa fortes. Quan la màquina detecta aquest tipus de contacte, s'activa un senyal d'emergència que ordena al robot apartar el braç o la cama afectada abans que es produeixi més mal.
Aquesta reacció no és emocional, ni de bon tros, però sí que s'assembla als reflexos humans: en tocar l'espina d'una rosa, el cos reacciona abans que el cervell processi completament el dolor. La nova pell persegueix la mateixa idea en clau robòtica, amb respostes molt ràpides que ajuden a protegir motors, juntes i, sobretot, les persones que hi treballen.
L'ús del terme “dolor” genera debat perquè pot induir a pensar que els robots pateixen, quan en realitat el que hi ha és un senyal tècnic de seguretat. Tot i això, molts experts reconeixen que aquest tipus de llenguatge ajuda a explicar de manera senzilla un sistema d'alarmes complex que, al final, millora la interacció entre humans i màquines.
En un context en què els humanoides ja no es queden només a fàbriques i laboratoris, sinó que comencen a aparèixer a magatzems, hospitals, centres logístics o fins i tot llars, comptar amb una pell sensible al perill deixa de ser ciència ficció per esdevenir una necessitat pràctica.
Una arquitectura inspirada en el sistema nerviós humà

La gran diferència respecte a les pells electròniques tradicionals està a la seva arquitectura neuromòrfica i jeràrquica. En comptes d'enviar totes les dades de pressió, temperatura o contacte a una CPU central perquè les analitzi amb calma, aquesta pell replica el flux d'informació del sistema nerviós humà, on molts reflexos es resolen abans d'arribar al cervell.
El disseny es compon, en línies generals, de quatre capes superposades. L'externa actua com una mena d'epidermis sintètica protectora, pensada per suportar cops, rascades i el desgast del treball diari. A sota se situen les capes amb sensors i circuits que compleixen el paper de nervis sensorials i vies de senyalització.
Aquests sensors mesuren de manera constant la pressió, la força exercida i la integritat de la pròpia pell, vinculada a la fabricació de sensors neuromòrfics. Cada cert temps, el sistema envia petits impulsos elèctrics a la unitat de processament com a senyal que tot segueix en ordre. Si es produeix un tall o un trencament, aquests impulsos desapareixen a la secció afectada, cosa que permet localitzar de forma ràpida on és el mal.
Quan la pell entra en contacte amb una altra superfície genera pics elèctrics que codifiquen la informació sobre el tacte: la intensitat del contacte, la distribució de la pressió o si es tracta d'un estímul puntual o difús. Tot això ajuda el robot a reconèixer objectes i ajustar la força amb què els agafa, una cosa clau si manipula peces fràgils o interactua amb pacients.
La novetat arriba quan l'estímul excedeix certs llindars de seguretat. En aquest cas, el sistema canvia de ruta: en lloc de passar per la CPU, s'envia un pols de més voltatge directament als motors del robot per desencadenar un moviment reflex immediat, per exemple retirar un braç sotmès a una pressió perillosa o reorientar una cama si detecta un impacte fort.
Del laboratori als robots humanoides i pròtesis

Bona part d'aquests avenços ja s'ha provat a robots humanoides equipats amb braços, mans i cames articulades. La idea és que puguin realitzar tasques complexes -des de doblegar roba fins a cuinar o tocar un instrument- sense posar en risc ni les persones ni a si mateixos quan passa alguna cosa inesperada.
Fins ara, molts robots depenen completament de la seva unitat de processament central per interpretar cada contacte. Això suposa un coll d'ampolla: qualsevol error de càlcul o mil·lisegon extra pot desembocar a cops forts, caigudes o agafades inadequades. Amb aquesta nova pell, una part de les decisions es resol gairebé “en automàtic”, cosa que es tradueix en menys accidents i menys avaries.
El potencial no es queda només a la robòtica industrial o de servei. Aquesta tecnologia té un enllaç directe amb el desenvolupament de pròtesis avançades i exoesquelets. Un sistema que distingeixi amb precisió la textura, la pressió i el dany pot millorar l'anomenat feedback hàptic, aquesta sensació de “sentir” allò que es toca a través d'una mà o una cama artificial.
A Europa, on s'impulsen projectes de robòtica col·laborativa a fàbriques, hospitals i centres de rehabilitació, es mira amb atenció a aquestes pells electròniques com un possible complement als estàndards de seguretat ja existents. La integració amb normatives europees podria accelerar la seva arribada a dispositius mèdics i robots de suport.
A més, en ser una tecnologia pensada per ser robusta, escalable i relativament barata, no es limita als grans humanoides. En un futur, podria arribar també a dispositius molt més quotidians, des d'aspiradores robots capaços de “notar” quan estan danyant un moble fins a petits assistents personals més delicats en tractar amb gent gran o amb mobilitat reduïda.
Com es construeix i es manté aquesta nova pell sintètica
Per acostar-se al comportament de la pell humana, els investigadors han dissenyat un sistema de mòduls. En lloc d'un gran recobriment únic que resultaria complicat de reparar, es recorre a pegats independents que es fixen mitjançant elements magnètics. Si una zona pateix un tall o deixa de funcionar, es pot substituir aquest tram sense desmuntar tot el robot.
Cada pegat integra sensors i circuits capaços de monitoritzar de forma permanent la pressió, la força i l'estat estructural. Aquests mòduls cobreixen braços, tors, mans o cames segons les necessitats del robot. La modularitat facilita adaptar la pell a perfils diferents: no serà igual folrar un braç industrial que s'enfronta a cops constants que una mà dissenyada per manipular instrumental mèdic.
El sistema d'autochequeig periòdic -els famosos impulsos elèctrics que s'envien cada pocs segons- s'ha plantejat com una eina clau de manteniment preventiu. Si deixa de rebre senyal en una zona, el mateix robot pot avisar que aquesta secció està malmesa i requerir intervenció, reduint el temps de parada per manteniment.
Els equips responsables del desenvolupament treballen ara per augmentar la sensibilitat global. El repte és que la pell pugui processar múltiples punts de contacte simultanis sense saturar-se, reconeixent patrons complexos, per exemple quan algú es recolza al cos del robot o quan aquest s'ha de moure en espais molt estrets.
Al costat de la duresa mecànica i la facilitat de reparació, un altre dels objectius és compatibilitzar aquesta pell amb diferents tipus de recobriments estètics, de manera que es pugui mantenir un aspecte agradable o més humà sense perdre prestacions tècniques. Això és important en entorns d'atenció sanitària o cura de gent gran, on la percepció social de la màquina compta gairebé tant com el seu rendiment.
Seguretat, llenguatge i ètica: per què les paraules importen
L'avenç de la pell neuromòrfica es produeix alhora que creix la preocupació per la seguretat en la interacció persona-robot. Incidents registrats en xarxes socials -com a vídeos en què un robot humanoide reprodueix un moviment humà que acaba causant un cop dolorós al seu operador– recorden que aquestes màquines encara no comprenen el context ni l'ètica dels actes.
En molts casos, els humanoides comercials simplement imiten en temps gairebé real les dades de moviment que reben, sense distingir si un gest és innocu o perillós. Per això la combinació de millors “pells” amb capes addicionals de control i límits de força és clau per reduir riscos, tant en laboratoris com en espais de treball reals.
El disseny neuronal jeràrquic de la nova pell busca precisament aportar-ne una capa extra de protecció davant d'impactes, talls o pressions excessives. En provocar un reflex ràpid, el sistema ajuda a evitar situacions en què un robot podria seguir empenyent o colpejant sense adonar-se del mal que està causant.
Alhora, l'ús del terme “dolor” per explicar aquestes funcions ha obert un debat ètic i comunicatiu. Alguns especialistes alerten que atribuir trets humans a màquines pot portar a confusió, alimentant la idea que els robots senten o pateixen com nosaltres, cosa que no es correspon amb la realitat.
La majoria dels investigadors insisteix a remarcar que es tracta de un senyal tècnic, un mecanisme d'alarma intel·ligent, útil per fer les màquines més segures i eficaces, però sense component emocional. La clau, coincideixen, és utilitzar un llenguatge que sigui didàctic sense portar a equívocs, especialment ara que aquests sistemes són cada vegada més presents en la vida quotidiana.
La irrupció d'aquestes pells electròniques neuromòrfiques apropa els robots a un comportament físic més semblant a l'humà quant a reflexos i protecció davant del dany. En combinar detecció de tacte, reconeixement de perill i resposta ultraràpida, aquests sistemes prometen reduir accidents, abaratir avaries i millorar la convivència entre persones i màquines a fàbriques, magatzems, hospitals i llars. Queda camí per recórrer en sensibilitat, regulació i ètica del llenguatge, però la idea que els robots comptin amb el seu propi sentit del dolor està deixant de ser un concepte futurista per convertir-se en una eina pràctica de seguretat i fiabilitat.
Sóc un apassionat de la tecnologia que ha convertit els seus interessos frikis en professió. Porto més de 10 anys de la meva vida utilitzant tecnologia d'avantguarda i traslladant tota mena de programes per pura curiositat. Ara he especialitzat en tecnologia d'ordinador i videojocs. Això és perquè des de fa més de 5 anys que treballo redactant per a diverses webs en matèria de tecnologia i videojocs, creant articles que busquen donar-te la informació que necessites amb un llenguatge comprensible per tothom.
Si tens qualsevol pregunta, els meus coneixements van des de tot allò relacionat amb el sistema operatiu Windows així com Android per a mòbils. I és que el meu compromís és amb tu, sempre estic disposat a dedicar-te uns minuts i ajudar-te a resoldre qualsevol dubte que tinguis a aquest món d'internet.