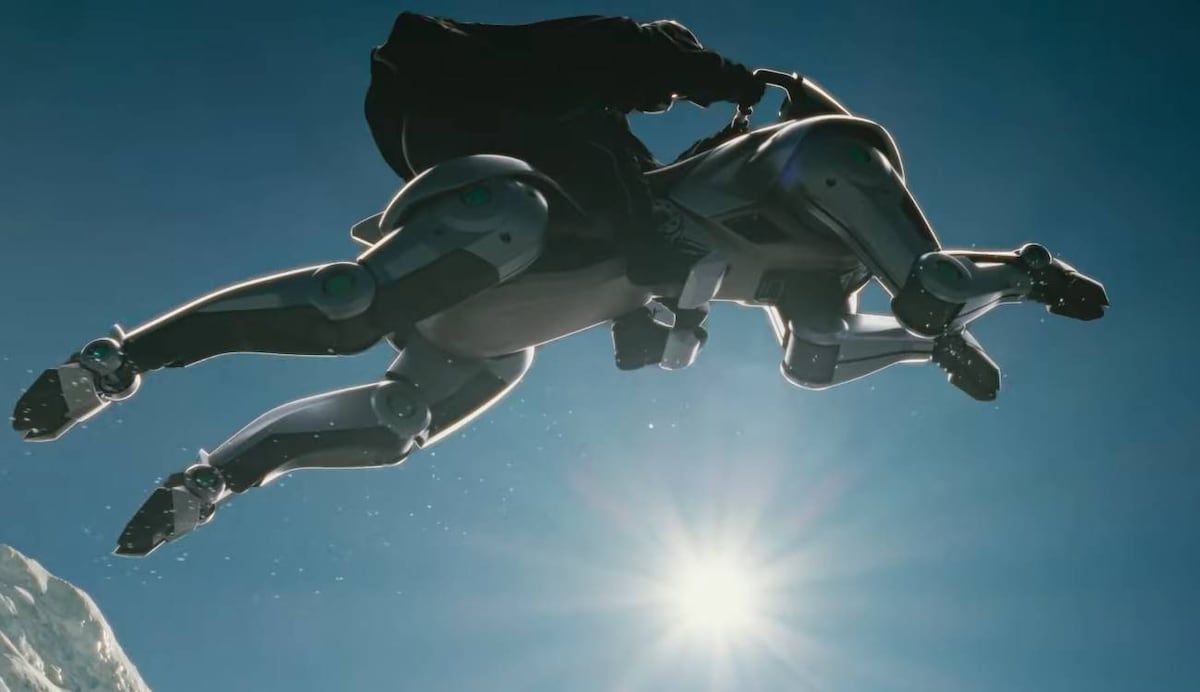
- Corleo on neljajalgse roboti prototüüp, mida Kawasaki esitles Osaka-Kansai 2025 näitusel.
- See robothobune on loodud liikuma keerulisel maastikul tänu liigendjalgade süsteemile ja vesinikmootorile.
- Sõit põhineb kehaliigutustel, ilma tavapäraste pidurite ja gaasipedaalideta.
- Sellel on navigeerimisekraan ja projitseeritud tehnoloogia, mis hõlbustab orienteerumist ja ohutust.
Ebatasasel maastikul sõitmine, raskete takistuste ületamine või mägipiirkondadega tutvumine ei tundu enam traditsioonilistele maastikusõidukitele ainuõigus. Vähemalt see on eeldus, mille Kawasaki on lauale toonud a kontseptsioon, mis on muutnud isikliku mobiilsuse maailma: Corleo, neljajalgne robot, mis simuleerib hobusega sõitmise kogemust, kuid täiesti futuristliku puudutusega.
Corleus oli esitleti prototüübina Osaka-Kansai 2025. aasta maailmanäitusel, ja see pole kedagi ükskõikseks jätnud. Loodusest inspireeritud – ehkki selge robotliku fookusega – see mehaaniline hobuslane tutvustab uut paradigmat, kuidas liikuda läbi lagedate või tavaliste sõidukitega raskesti ligipääsetavate ruumide.
Hobuse hingega robot, kes tahab mäge vallutada
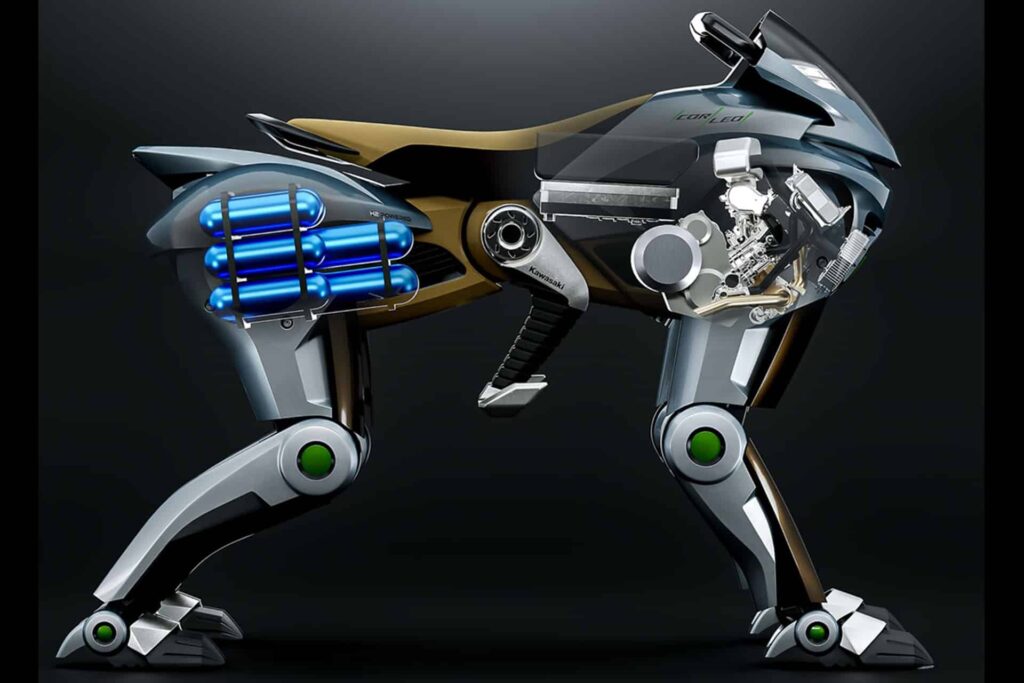
Kawasaki on valinud disaini, mis ühendab robottehnika, tehisintellekti ja keskkonnasäästlikkuse. Corleol pole rattaid. Selle asemel kõnnib ja jookseb see neljal liigendatud jalal. Kõik need lõpevad teatud tüüpi jagatud kummist kabjadega, mille eesmärk on parandada veojõudu ja kohaneda raskete pindadega, nagu kivid, liiv või lumi.
Konstruktsioon võimaldab sõltumatut vedrustust esi- ja tagajalgade vahel, mis aitab neelata lööke nii kõndimisel kui ka sörkimisel. See tähendab a voolavam, loomulikum ja ohutum liikumine, isegi keeruliste stsenaariumide korral, nagu nõlvad või järsud nõlvad.
Mis puudutab selle juhtimist, Corleol pole traditsioonilisi juhtrauda ega pedaale. Selle asemel saab piloodist juhtimissüsteemi aktiivne osa. Kasutades jalalaudades ja roolisüsteemis olevaid andureid, tuvastab robot kasutaja keharaskuse liikumise ja tegutseb vastavalt. Põhimõtteliselt reageerib sõiduk keha liigutustele koheselt, nagu oleks tegemist päris hobusega.
Arvesse on võetud ka mugavust, kuna jalatoed on reguleeritava kõrgusega ja iste mahutab kontseptsiooni mõne versiooni kohaselt isegi teise reisija. Disain püüab säilitada ergonoomilist kehaasendit, ilma et peaks tõusma kallakule, tagades nähtavuse ja pideva tasakaalu.
Puhas energia ja intelligentne autonoomia: Corleo süda

Selle neljajalgse roboti üks alustalasid on selle jätkusuutlik tõukejõusüsteem. Corleo on varustatud väikese 150 cmXNUMX sisepõlemismootoriga, mille ainus ülesanne on toota elektrit vesinikust, mis on salvestatud sõiduki tagaosas asuvasse padrunisse. See elekter toidab iga jala sõltumatuid elektrimootoreid.
Tänu sellele energialahendusele sõiduk ei eralda saastavaid gaase, mis muudab selle ökoloogilisest seisukohast potentsiaalselt elujõuliseks võimaluseks. Lisaks võimaldab see konfiguratsioon töötada diskreetselt, vähendades teiste mootorsõidukite puhul levinud mürasaastet. See liikuvuse areng on seotud ka uuenduslike tehnoloogiatega, mida on aastate jooksul välja töötatud.
Ametlikke sõiduulatuse ega kiiruse andmeid pole kinnitatud, kuid mõned teated näitavad, et see võib soodsates tingimustes jõuda 240 kilomeetrini ühe laadimisega ja liikuda kiirusega 80 km/h lähedal. Siiski Kuna tegemist on kontseptuaalse prototüübiga, neid andmeid ei ole veel kinnitatud.
Samuti on kasutajakogemuses oluline roll navigatsioonisüsteemil. Corleol on istme ees asuv digitaalne ekraan, mis Annab olulist teavet, nagu vesiniku tase, kavandatud marsruut, raskuskese ja muu huvipakkuv teave. Öösel projitseerib süsteem ise signaale maapinnale hõlbustada orienteerumist pimedas või halva nähtavusega piirkondades.
Ehitatav tulevik: mida Corleolt oodata
Vaatamata tekkinud ootusärevusele, Corleot ei müüda ega tule ka lähitulevikus. Kawasaki Expo esitletud robot on kontseptsioon ja isegi mõned selle kõige arenenumad funktsioonid on alles arendusfaasis. Firmast endast on märkinud, et nad ei eelda täielikult toimivat mudelit enne 2050. aastat.
See aga ei tähenda, et Corleo oleks ainult visuaalne demonstratsioon. Selle esitlus on osa laiemast Kawasaki strateegiast, mille eesmärk on uurida uusi isikliku mobiilsuse vorme., sealhulgas lahendused neile, kes peavad reisima läbi keskkondade, kus traditsioonilised sõidukid ei ole elujõulised ega praktilised.
On neid, kes näevad seda robothobust võimaliku tööriistana sellistes valdkondades nagu vaba aja veetmine, loodusturism või isegi tervishoiu kasutamine piiratud liikumisvõimega inimestele, kes otsivad kontrollitud välikogemusi. Disain, mis on loodud ohutuse ja mugavuse säilitamiseks igal ajal, tugevdab ka selle võimalikku rakendamist maa- ja mägikeskkonnas..
Corleo on loodud ka pakkuma teistsugust sensoorset ja emotsionaalset kogemust. See ei tähenda ainult liikumist, vaid keskkonnaga ühenduse loomist, maastiku tunnetamist oma jalge all – või mehaaniliste jalgade all – ja looduse taasavastamist teisest vaatenurgast. Bränd võtab selle kokku katsena vabastada inimese "liikumisinstinkt"..
See ainulaadne Kawasaki prototüüp pakub radikaalset muudatust isikliku transpordi mõistmises: kaugemale kiirusest, võimsusest või disainist, Corleo kutsub teid ette kujutama maailma, kus liikuvus on ühtaegu intelligentne, ökoloogiline ja emotsionaalne. Kuigi käia on veel pikk tee, on uue liikumisviisi seeme juba maha pandud.
Olen tehnoloogiahuviline, kes on muutnud oma "nohikese" huvidest elukutse. Olen veetnud üle 10 aasta oma elust tipptehnoloogiat kasutades ja puhtast uudishimust igasuguste programmide kallal nokitsenud. Nüüd olen spetsialiseerunud arvutitehnoloogiale ja videomängudele. Seda seetõttu, et rohkem kui 5 aastat olen kirjutanud erinevatele tehnoloogia ja videomängude veebisaitidele, luues artikleid, mille eesmärk on anda teile vajalikku teavet kõigile arusaadavas keeles.
Kui teil on küsimusi, siis minu teadmised ulatuvad kõigest, mis on seotud nii Windowsi operatsioonisüsteemiga kui ka Androidiga mobiiltelefonidele. Ja ma olen pühendunud teile, olen alati nõus kulutama paar minutit ja aitama teil lahendada kõik küsimused, mis teil selles Interneti-maailmas tekkida võivad.