- Cov kws tshawb fawb tab tom txhim kho lub hlwb-lub computer interface uas tso cai rau lub caj npab robotic tswj nrog lub siab.
- Lub kaw lus siv kev txawj ntse txawj ntse los hloov kho lub hlwb hloov thiab txhim kho qhov tseeb.
- Tus neeg mob tuaj yeem ua haujlwm txhua hnub, xws li khaws thiab txav khoom, yam tsis muaj kev pabcuam sab nraud.
- Qhov kev tawg ua rau muaj kev cia siab rau cov neeg tuag tes tuag taw, txawm hais tias nws tseem ntsib cov teeb meem kev siv tshuab thiab kev nkag tau yooj yim.

Ib pawg neeg tshawb nrhiav tau tsim ib qho tshiab interface hlwb-computer (BCI) uas tau tso cai rau tus txiv neej tuag tes tuag taw tswj lub caj npab robotic siv nws txoj kev xav xwb. Qhov kev tawg no yog qhov tshwm sim los ntawm kev tshawb fawb los ntawm cov kws tshawb fawb hauv University of California, San Francisco (UCSF) thiab cog lus los txhim kho lub neej zoo ntawm cov neeg muaj lub cev muaj zog. Cov txheej txheem no tuaj yeem ua ib kauj ruam rau kev siv cov txheej txheem ywj pheej uas pab nrog kev txav mus los.
Ib qho ntawm qhov zoo ntawm qhov system no yog nws li kev ruaj khov mus sij hawm ntev. Tsis zoo li yav dhau los technologies uas yuav tsum tau calibration tas mus li, cov cuab yeej no tswj kev khiav hauj lwm uninterruptedly rau xya lub hlis yam tsis tas yuav tsum tau rau qhov tseem ceeb hloov, kos ib qho tseem ceeb hauv kev loj hlob ntawm neuroprostheses. Qhov kev tawg no muab txoj hauv kev tshiab rau lub robotics thiab nws cov haujlwm.
Yuav ua li cas lub hlwb-computer interface ua haujlwm
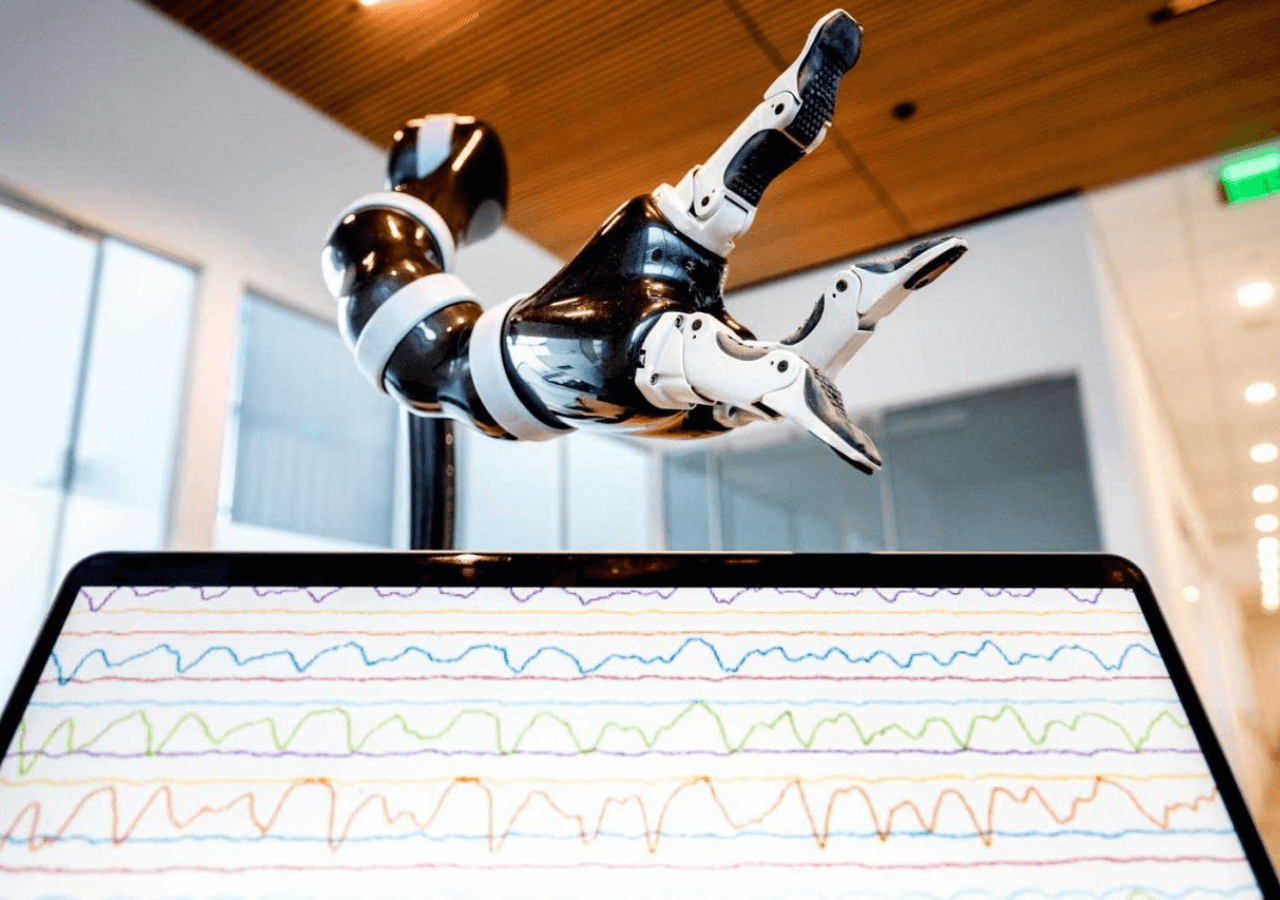
Lub kaw lus yog raws li cov sensors me me cog rau ntawm qhov chaw ntawm lub hlwb ntawm tus neeg mob, lub luag haujlwm rau sau cov haujlwm neuronal thaum tus neeg mob xav txog kev txav mus los. Cov ntaub ntawv no yog ua tiav los ntawm tus qauv ntawm kev txawj ntse cuav uas txhais lub hlwb cov teeb liab rau hauv cov lus txib los tswj cov caj npab neeg hlau, thaj chaw uas muaj kev vam meej tseem ceeb hauv kev siv tshuab neeg hlau.
Txhawm rau txhim kho qhov tseeb, lub tus neeg mob thawj zaug xyaum nrog ib tug virtual robotic caj npab, tso cai rau koj ua kom zoo dua koj qhov kev xav ua ntej siv kev tswj hwm rau lub caj npab tiag tiag.
Los ntawm kev xav mus rau kev ua
Tus neeg mob, uas tau ploj mus thiab hais lus tom qab mob stroke, tau ua haujlwm txhua hnub nrog cov neeg hlau caj npab, xws li khaws lub khob thiab muab tso rau hauv qab lub tshuab xa dej. Cov kev nce qib no qhia txog lub peev xwm ntawm qhov system mus rau txhawb kev ywj pheej ntawm cov neeg uas muaj lub cev muaj zog loj. Lub peev xwm los tswj cov cuab yeej zoo li no tuaj yeem qhib qhov rooj rau cov ntaub ntawv tshiab kev siv hauv robotics.
Thoob plaws hauv qhov kev sim, cov kws tshawb fawb tau pom qhov ntawd lub hlwb teeb liab cuam tshuam nrog kev txav mus los Lawv nyob twj ywm tsis tu ncua, txawm hais tias lawv qhov chaw nyob hauv lub hlwb txawv me ntsis. Artificial txawj ntse kho lub kaw lus rau cov kev hloov no yam tsis muaj kev cuam tshuam nws qhov kev ua tau zoo. kev ua kom raug.
Cov teeb meem thiab yav tom ntej ntawm thev naus laus zis
Txawm tias cov txiaj ntsig zoo kawg tau txais, Tseem muaj qhov yuav tsum tau txhim kho. Tam sim no, tus neeg hlau caj npab txav me ntsis qeeb, yog li pab pawg UCSF tseem ua haujlwm rau nws. optimize ceev thiab fluidity ntawm lub kaw lus.
Neurologist Karunesh Ganguly, tus thawj coj ua haujlwm, piav qhia qhov ntawd kev sib xyaw ntawm tib neeg kev kawm thiab kev txawj ntse yog qhov tseem ceeb ua kom cov interfaces no ua haujlwm tau zoo thiab siv tau rau yav tom ntej. Kev tshawb fawb txuas ntxiv hauv cheeb tsam no tuaj yeem yog qhov tseem ceeb rau kev ua tiav hauv cov cuab yeej siv tau.
Daim ntawv thov possibilities thiab accessibility

Cov tshuab no tsis tsuas yog muaj kev siv hauv kev tswj hwm cov ceg tawv robotic, tab sis nws kuj tuaj yeem pab cov neeg nrog hais lus tsis taus. Kev tshawb fawb yav dhau los tau qhia tias cov tshuab zoo sib xws tuaj yeem ua rau tib neeg tsis muaj peev xwm hais lus sib txuas lus zoo.
Txawm li cas los xij, cov kev nce qib no tseem ntsib teeb meem, xws li cov tus nqi siab ntawm kev cog paj hlwb thiab cov infrastructure tsim nyog rau nws txoj haujlwm. Raws li kev siv thev naus laus zis, cov tshuab no xav kom dhau los ua ntau dua nkag tau yooj yim rau ntau tus neeg.
Txoj kev loj hlob ntawm lub hlwb-computer interfaces zoo li no cim lub qab ntug tshiab nyob rau hauv lub kev sib tshuam ntawm neuroscience, kev txawj ntse txawj ntse, thiab robotics. Txawm hais tias tseem muaj txoj hauv kev mus ntev, qhov kev nce qib no sawv cev rau kev cia siab rau cov neeg uas tau ploj mus, coj peb los ze rau lub neej yav tom ntej. Kev txwv lub cev tuaj yeem kov yeej los ntawm kev siv tshuab.
Kuv yog ib tus neeg nyiam siv thev naus laus zis uas tau hloov nws txoj kev nyiam "geek" rau hauv txoj haujlwm. Kuv tau siv ntau tshaj 10 xyoo ntawm kuv lub neej siv cov cuab yeej siv thev naus laus zis thiab tinkering nrog txhua yam kev pab cuam tawm ntawm kev xav paub dawb huv. Tam sim no kuv tau tshwj xeeb hauv computer technology thiab video games. Qhov no yog vim ntau tshaj 5 xyoo kuv tau sau rau ntau lub vev xaib ntawm kev siv tshuab thiab kev ua si video, tsim cov ntawv uas nrhiav kom muab cov ntaub ntawv koj xav tau hauv hom lus uas txhua tus neeg nkag siab.
Yog tias koj muaj lus nug, kuv qhov kev paub yog los ntawm txhua yam ntsig txog Windows operating system nrog rau Android rau cov xov tooj ntawm tes. Thiab kuv txoj kev cog lus yog rau koj, Kuv ib txwm kam siv ob peb feeb thiab pab koj daws cov lus nug uas koj muaj nyob hauv lub ntiaj teb no hauv internet.