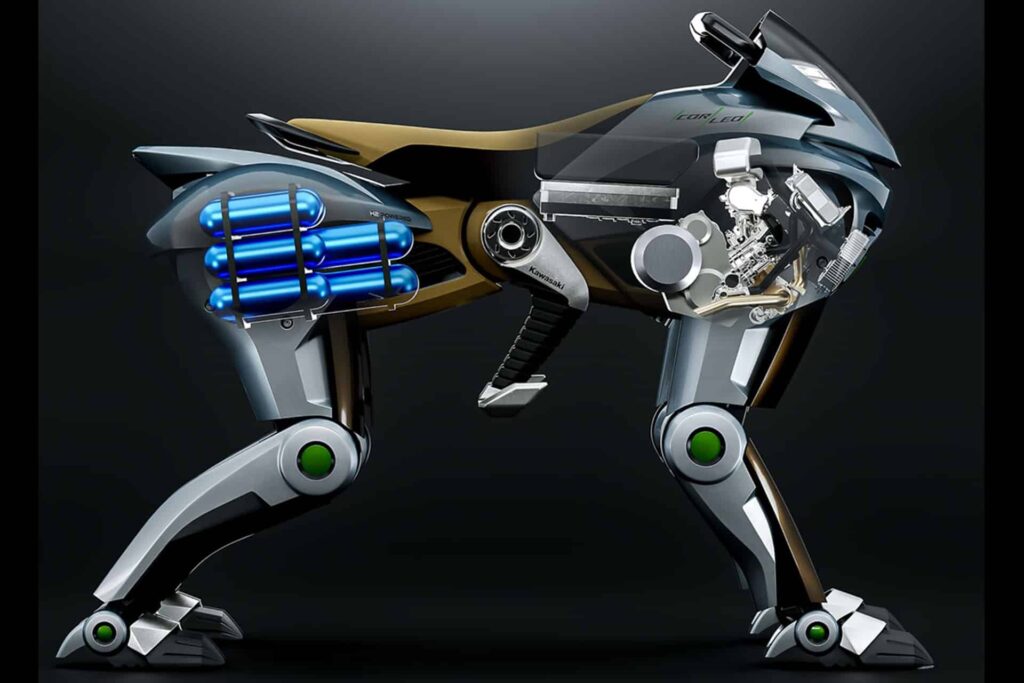
- コルレオは、川崎重工が2025年大阪・関西万博で発表した四足歩行ロボットのプロトタイプです。
- このロボット馬は、関節式脚システムと水素エンジンにより、複雑な地形を移動できるように設計されています。
- 運転は従来のブレーキやアクセルを使わず、体の動きに基づいて行われます。
- 方向感覚と安全性を高めるナビゲーション スクリーンと投影技術を備えています。
起伏の多い地形を移動したり、扱いにくい障害物を回避したり、山岳地帯を探索したりすることは、もはや従来のオフロード車に限定されたものではなくなりました。少なくとも、それがカワサキが提案した前提だ。 パーソナルモビリティの世界に革命をもたらしたコンセプト: 乗馬体験をシミュレートする四足歩行ロボット「コルレオ」、しかし完全に未来的なタッチを加えています。
コルレオは 2025年大阪・関西万博でプロトタイプとして発表、そして誰も無関心ではいられない。この機械の馬は、自然にインスピレーションを受けながらも、明らかにロボットに焦点を当てており、オープンスペースや従来の乗り物ではアクセスが困難な場所を移動する方法に新しいパラダイムを導入しています。
山を征服したい馬の魂を持つロボット
川崎重工はロボット工学、人工知能、環境持続可能性を組み合わせた設計を選択した。。コルレオには車輪がありません。代わりに、4 つの関節脚で歩いたり走ったりします。これらはそれぞれ、一種の分割されたゴム製の蹄で終わっており、牽引力を向上させ、岩、砂、雪などの困難な路面に適応することを目的としています。
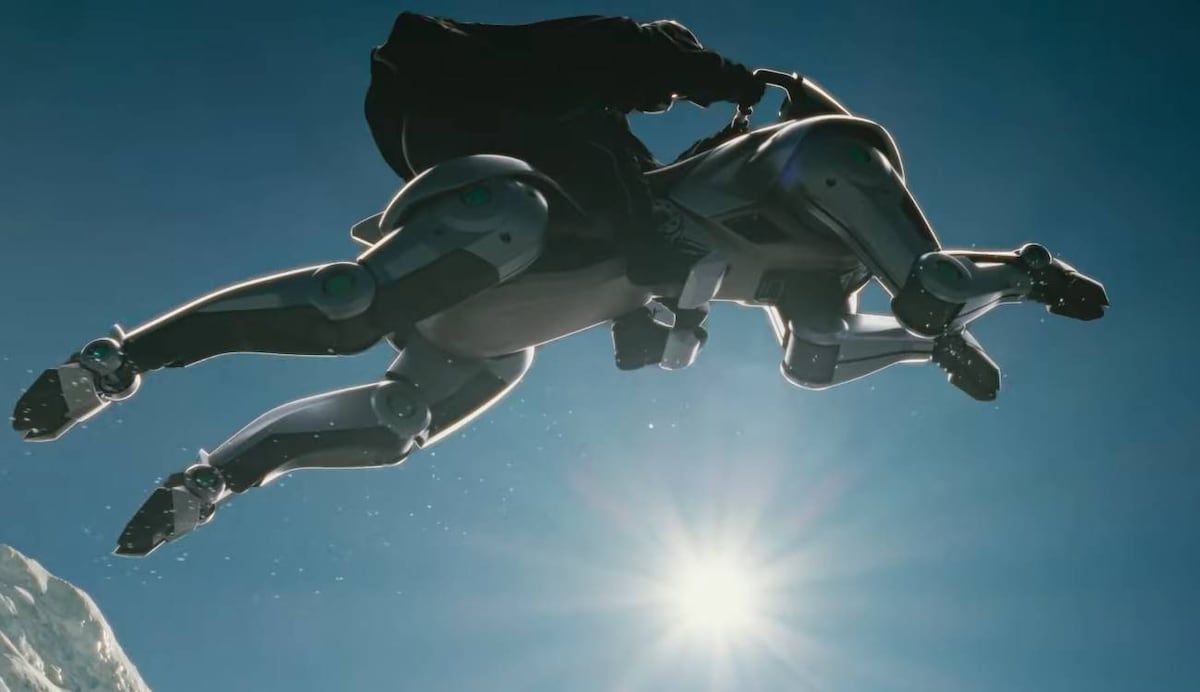
この構造により、前脚と後脚が独立してサスペンションされるようになり、歩行時と速歩時の衝撃を吸収するのに役立ちます。これは、 より滑らかで自然で安全な動き急な坂や傾斜などの複雑なシナリオでも機能します。
その取り扱いについては、 コルレオには従来のハンドルやペダルはありません。代わりに、パイロットは制御システムの積極的な一部になります。ロボットはフットレストとステアリングシステムのセンサーを使用して、ユーザーの体重が移動する場所を検出し、それに応じて反応します。基本的に、この車両は本物の馬と同じように、体の動きに即座に反応します。
快適性も考慮されていますフットレストは高さ調節可能で、コンセプトのいくつかのバージョンによれば、シートには2人目の乗客を収容する能力もあるとのことだ。このデザインは、斜面を登るときにかがむことなく人間工学的な姿勢を維持し、視界と一定のバランスを確保することを目的としています。
クリーンエネルギーとインテリジェントな自律性:コルレオの核心

この四足歩行ロボットの柱の一つは、持続可能な推進システムです。 コルレオには150ccの小型内燃エンジンが搭載されているその唯一の機能は、車両後部にあるカートリッジに貯蔵された水素から電気を生成することです。この電気は各脚の独立した電気モーターに動力を供給します。
このエネルギーソリューションのおかげで、 車両は汚染ガスを排出しないこれは、生態学的観点から見て潜在的に実行可能な選択肢となります。さらに、この構成により、目立たずに操作できるため、他の動力付き車両に共通する騒音公害が軽減されます。モビリティのこの進化は、長年にわたって開発されてきた革新的なテクノロジーにも関係しています。
公式の航続距離や速度の数値は確認されていないが、一部の報道によると、240回の充電で80キロメートル走行でき、好条件であれば時速XNUMXキロメートル近くで走行できる可能性があるという。 しかし、 これは概念的なプロトタイプなので、 これらのデータはまだ検証されていません.
ナビゲーション システムもユーザー エクスペリエンスにおいて重要な役割を果たします。コルレオには座席の前にデジタルスクリーンがあり、 水素レベル、予定ルート、重心、その他の関連データなどの重要な情報を提供します。。夜間には、システム自体が地上に信号を投射し、 暗い場所や見えにくい場所での方向感覚を養う.
建設中の未来:コルレオに何を期待するか
A pesar de la expectación generada, Corleo は販売されておらず、近い将来も販売される予定はありません。。川崎重工が博覧会で発表したロボットはコンセプトであり、そのより高度な機能の一部はまだ開発段階にある。会社自体から 彼らは、2050年までに完全に機能するモデルが完成するとは予想していないと示唆している。.
しかし、Corleo が単なる視覚的なデモンストレーションであるという意味ではありません。 この導入は、パーソナルモビリティの新しい形を模索するという川崎重工の幅広い戦略の一環です。従来の車両が利用できない、または実用的ではない環境で移動する必要がある人向けのソリューションも含まれます。
このロボット馬は、レクリエーション、自然観光、あるいは制御された屋外体験を求める運動障害のある人々の補助的な使用などの分野での潜在的なツールになると考える人もいます。 常に安全性と快適性を維持するよう考案された設計は、農村部や山岳部での応用の可能性も高めます。.
Corleo は、異なる感覚と感情の体験を提供するように設計されています。それは単に移動するということではなく、環境とつながり、足の下、あるいは機械の脚の下の地面を感じ、異なる視点から自然を再発見することです。ブランドはこれを、 人間の「運動本能」を解放する.
このユニークなカワサキのプロトタイプは、スピード、パワー、デザインを超えて、個人の交通手段に対する理解に根本的な変化を提案しています。 Corleo は、モビリティがスマートで、環境に優しく、同時に感情的な世界を想像するよう呼びかけます。。まだ道のりは長いですが、新しい移動手段の種はすでに蒔かれています。
私はテクノロジー愛好家であり、その「オタク」の興味を職業に変えています。私は 10 年以上、純粋な好奇心から最先端のテクノロジーを使用し、あらゆる種類のプログラムをいじくり回してきました。現在はコンピューター技術とビデオゲームを専門にしています。これは、私が 5 年以上、テクノロジーやビデオ ゲームに関するさまざまな Web サイトに執筆し、誰にでも理解できる言語で必要な情報を提供することを目的とした記事を作成しているためです。
ご質問がございましたら、私の知識は Windows オペレーティング システムから携帯電話用の Android に関連するあらゆるものまで多岐にわたります。そして、私はあなたに対して、いつでも喜んで数分を費やして、このインターネットの世界であなたが抱いている疑問を解決するお手伝いをしたいと考えています。