- Alpamayo-R1 ແມ່ນຕົວແບບ VLA ທີ່ມີວິໄສທັດ, ພາສາ - ການກະ ທຳ ທຳ ອິດທີ່ມຸ້ງໄປສູ່ພາຫະນະທີ່ປົກຄອງຕົນເອງ.
- ປະສົມປະສານການໃຫ້ເຫດຜົນເທື່ອລະຂັ້ນຕອນເຂົ້າໃນການວາງແຜນເສັ້ນທາງເພື່ອແກ້ໄຂສະຖານະການທີ່ສັບສົນ.
- ມັນເປັນຮູບແບບເປີດ, ອີງໃສ່ NVIDIA Cosmos Reason ແລະມີຢູ່ໃນ GitHub ແລະ Hugging Face.
- AlpaSim ແລະ Physical AI Open Datasets ເສີມສ້າງຄວາມຖືກຕ້ອງ ແລະການທົດລອງກັບ AR1.

ລະບົບນິເວດການຂັບລົດອັດຕະໂນມັດໃຊ້ເວລາກ້າວໄປຂ້າງຫນ້າກັບການມາເຖິງຂອງ DRIVE Alpamayo-R1 (AR1), ຮູບແບບປັນຍາປະດິດທີ່ຖືກອອກແບບມາເພື່ອໃຫ້ຍານພາຫະນະບໍ່ພຽງແຕ່ "ເບິ່ງ" ສະພາບແວດລ້ອມ, ແຕ່ຍັງເຂົ້າໃຈມັນແລະປະຕິບັດຕາມຄວາມເຫມາະສົມ. ການພັດທະນາໃຫມ່ນີ້ຈາກ NVIDIA ມັນໄດ້ຖືກຕໍາແຫນ່ງເປັນມາດຕະຖານສໍາລັບຂະແຫນງການ, ໂດຍສະເພາະແມ່ນໃນຕະຫຼາດເຊັ່ນ: ເອີຣົບແລະສະເປນບ່ອນທີ່ລະບຽບການ ແລະຄວາມປອດໄພທາງຖະໜົນແມ່ນເຂັ້ມງວດໂດຍສະເພາະ.
ການພັດທະນາໃຫມ່ນີ້ຈາກ NVIDIA ຖືກນໍາສະເຫນີເປັນ ຮູບແບບ VLA ທໍາອິດ (ວິໄສທັດ - ພາສາ - ການປະຕິບັດ) ຂອງການໃຫ້ເຫດຜົນເປີດໄດ້ສຸມໃສ່ໂດຍສະເພາະກ່ຽວກັບ ການຄົ້ນຄວ້າກ່ຽວກັບຍານພາຫະນະອັດຕະໂນມັດແທນທີ່ຈະພຽງແຕ່ການປະມວນຜົນຂໍ້ມູນເຊັນເຊີ, Alpamayo-R1 ປະກອບມີຄວາມສາມາດໃນການສົມເຫດສົມຜົນທີ່ມີໂຄງສ້າງ, ເຊິ່ງເປັນກຸນແຈເພື່ອກ້າວໄປສູ່ລະດັບການປົກຄອງທີ່ສູງຂຶ້ນໂດຍບໍ່ສູນເສຍຄວາມໂປ່ງໃສແລະຄວາມປອດໄພໃນການຕັດສິນໃຈ.
Alpamayo-R1 ແມ່ນຫຍັງ ແລະເປັນຫຍັງມັນຈຶ່ງເປັນຈຸດປ່ຽນ?

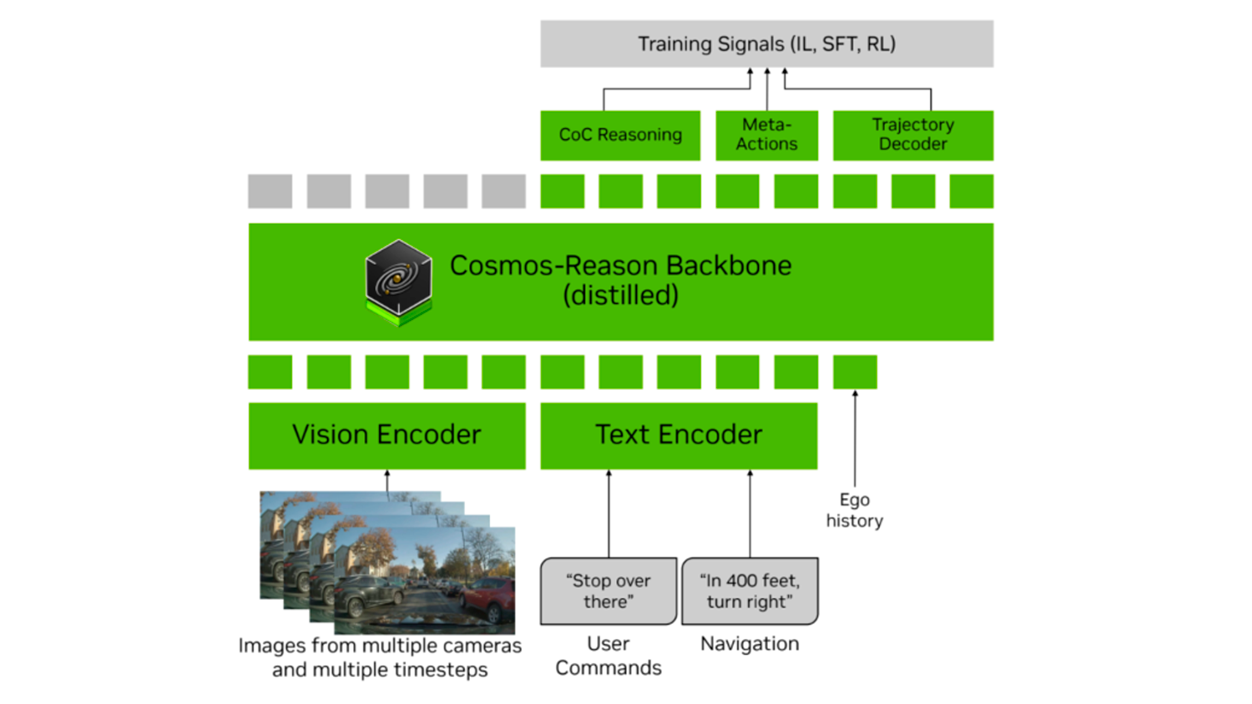
Alpamayo-R1 ແມ່ນສ່ວນຫນຶ່ງຂອງ AI ຮຸ່ນໃຫມ່ທີ່ປະສົມປະສານ ວິໄສທັດຄອມພິວເຕີ, ການປຸງແຕ່ງພາສາທໍາມະຊາດ, ແລະການປະຕິບັດທີ່ຊັດເຈນວິທີການ VLA ນີ້ອະນຸຍາດໃຫ້ລະບົບໄດ້ຮັບຂໍ້ມູນສາຍຕາ (ກ້ອງຖ່າຍຮູບ, ເຊັນເຊີ), ອະທິບາຍແລະອະທິບາຍເປັນພາສາ, ແລະເຊື່ອມຕໍ່ມັນກັບການຕັດສິນໃຈຂັບລົດທີ່ແທ້ຈິງ, ທັງຫມົດພາຍໃນການໄຫຼຂອງເຫດຜົນດຽວກັນ.
ໃນຂະນະທີ່ຮູບແບບການຂັບຂີ່ແບບອັດຕະໂນມັດອື່ນໆໄດ້ຖືກຈໍາກັດຕໍ່ການຕອບສະຫນອງຕໍ່ຮູບແບບທີ່ໄດ້ຮຽນຮູ້ແລ້ວ, AR1 ສຸມໃສ່ການ ການໃຫ້ເຫດຜົນເທື່ອລະຂັ້ນ ຫຼືລະບົບຕ່ອງໂສ້ຂອງຄວາມຄິດປະສົມປະສານໂດຍກົງເຂົ້າໃນການວາງແຜນເສັ້ນທາງ. ນີ້ ໝາຍ ຄວາມວ່າຍານພາຫະນະສາມາດ ທຳ ລາຍສະຖານະການທີ່ສັບສົນ, ປະເມີນທາງເລືອກ, ແລະໃຫ້ເຫດຜົນພາຍໃນວ່າເປັນຫຍັງມັນເລືອກການບັງຄັບໃຊ້ສະເພາະ, ເຮັດໃຫ້ມັນງ່າຍຂຶ້ນ ສຳ ລັບນັກສືບສວນແລະຜູ້ຄວບຄຸມໃນການປະເມີນ.
ການເດີມພັນຂອງ NVIDIA ກັບ Alpamayo-R1 ເກີນກວ່າການປັບປຸງລະບົບການຄວບຄຸມ: ເປົ້າຫມາຍແມ່ນເພື່ອຂັບລົດ. AI ສາມາດອະທິບາຍພຶດຕິກໍາຂອງມັນນີ້ແມ່ນກ່ຽວຂ້ອງໂດຍສະເພາະໃນອານາເຂດເຊັ່ນ: ສະຫະພາບເອີຣົບ, ບ່ອນທີ່ traceability ຂອງການຕັດສິນໃຈອັດຕະໂນມັດແລະຄວາມຮັບຜິດຊອບດ້ານເຕັກໂນໂລຢີໃນດ້ານການຂົນສົ່ງແມ່ນມີມູນຄ່າເພີ່ມຂຶ້ນ.
ດັ່ງນັ້ນ, AR1 ບໍ່ພຽງແຕ່ເປັນຮູບແບບການຮັບຮູ້ແບບພິເສດ, ແຕ່ເປັນເຄື່ອງມືທີ່ຖືກອອກແບບເພື່ອແກ້ໄຂສິ່ງທ້າທາຍອັນໃຫຍ່ຫຼວງຂອງ ການຂັບຂີ່ທີ່ປອດໄພ ແລະເປັນມິດກັບມະນຸດນີ້ແມ່ນລັກສະນະທີ່ມີຄວາມສໍາຄັນສໍາລັບການຮັບຮອງເອົາຕົວຈິງຂອງຕົນກ່ຽວກັບຖະຫນົນຫົນທາງເອີຣົບ.
ເຫດຜົນໃນສະຖານະການຊີວິດຈິງແລະສະພາບແວດລ້ອມທີ່ສັບສົນ
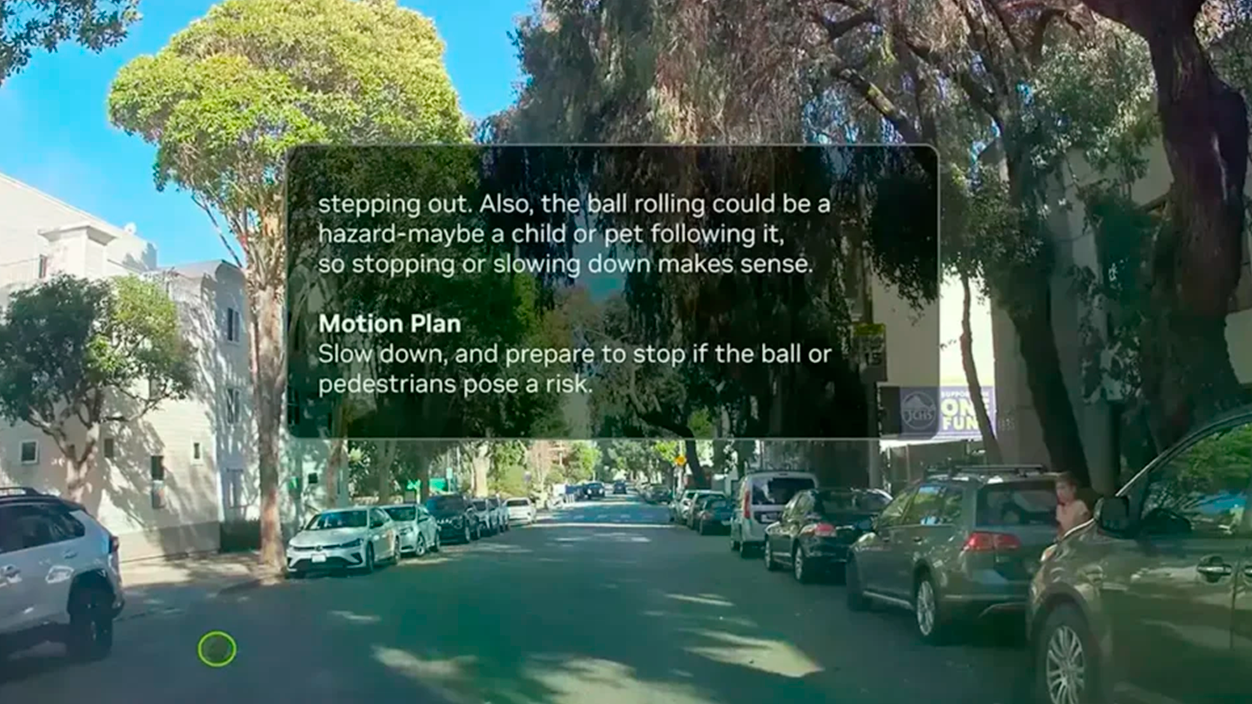
ຫນຶ່ງໃນຈຸດແຂງຂອງ Alpamayo-R1 ແມ່ນຂອງມັນ ຄວາມສາມາດໃນການຈັດການ ການຕັ້ງຄ່າຕົວເມືອງທີ່ເຕັມໄປດ້ວຍ nuancesບ່ອນທີ່ແບບທີ່ຜ່ານມາມີແນວໂນ້ມທີ່ຈະມີບັນຫາຫຼາຍ. ການຂ້າມຜ່ານກັບຄົນຍ່າງທາງຍ່າງໃກ້ທາງຂ້າມທາງດ້ວຍຄວາມລັງເລໃຈ, ຍານພາຫະນະທີ່ຈອດບໍ່ດີທີ່ຄອບຄອງບາງສ່ວນຂອງເລນ, ຫຼືການປິດຖະໜົນຢ່າງກະທັນຫັນແມ່ນຕົວຢ່າງຂອງສະພາບການທີ່ການກວດຫາວັດຖຸແບບງ່າຍດາຍບໍ່ພຽງພໍ.
ໃນປະເພດຂອງສະພາບແວດລ້ອມເຫຼົ່ານີ້, AR1 ແຍກສາກອອກເປັນ ຂັ້ນຕອນນ້ອຍຂອງການສົມເຫດສົມຜົນຄໍານຶງເຖິງການເຄື່ອນໄຫວຄົນຍ່າງ, ຕໍາແຫນ່ງຂອງຍານພາຫະນະອື່ນໆ, ປ້າຍ, ແລະອົງປະກອບເຊັ່ນ: ເສັ້ນທາງລົດຖີບຫຼືເຂດການໂຫຼດແລະ unloading. ຈາກນັ້ນ, ມັນປະເມີນເສັ້ນທາງທີ່ເປັນໄປໄດ້ທີ່ແຕກຕ່າງກັນແລະເລືອກເສັ້ນທາງທີ່ມັນຖືວ່າປອດໄພທີ່ສຸດແລະເຫມາະສົມທີ່ສຸດ. ໃນເວລາທີ່ແທ້ຈິງ
ຖ້າລົດທີ່ປົກຄອງຕົນເອງກໍາລັງຂັບຂີ່, ຕົວຢ່າງ, ຕາມຖະຫນົນເອີຣົບແຄບທີ່ມີເສັ້ນທາງລົດຖີບຂະຫນານແລະຄົນຍ່າງທາງຈໍານວນຫລາຍ, Alpamayo-R1 ສາມາດວິເຄາະແຕ່ລະພາກສ່ວນຂອງເສັ້ນທາງ, ອະທິບາຍສິ່ງທີ່ມັນສັງເກດເຫັນ, ແລະວິທີການແຕ່ລະປັດໃຈມີອິດທິພົນຕໍ່ການຕັດສິນໃຈຂອງມັນ. ເພື່ອຫຼຸດຜ່ອນຄວາມໄວ, ເພີ່ມທະວີໄລຍະທາງຂ້າງ, ຫຼືປັບປຸງເລັກນ້ອຍ trajectory.
ລະດັບຂອງລາຍລະອຽດທີ່ອະນຸຍາດໃຫ້ທີມງານຄົ້ນຄ້ວາແລະການພັດທະນາທົບທວນຄືນ ເຫດຜົນພາຍໃນຂອງຕົວແບບນີ້ອະນຸຍາດໃຫ້ສໍາລັບການກໍານົດຄວາມຜິດພາດຫຼືຄວາມລໍາອຽງທີ່ອາດຈະເກີດຂຶ້ນແລະການປັບຕົວຂອງຂໍ້ມູນການຝຶກອົບຮົມແລະກົດລະບຽບການຄວບຄຸມ. ສໍາລັບຕົວເມືອງໃນເອີຣົບ, ມີສູນກາງປະຫວັດສາດ, ການຈັດວາງຖະຫນົນທີ່ບໍ່ສະຫມໍ່າສະເຫມີ, ແລະການສັນຈອນທີ່ມີການປ່ຽນແປງສູງ, ຄວາມຍືດຫຍຸ່ນນີ້ແມ່ນມີຄຸນຄ່າໂດຍສະເພາະ.
ນອກຈາກນັ້ນ, ຄວາມສາມາດໃນການກໍານົດທາງເລືອກຂອງເຂົາເຈົ້າເປີດປະຕູສູ່ການເຊື່ອມໂຍງທີ່ດີກວ່າກັບກົດລະບຽບໃນອະນາຄົດ. ຍານພາຫະນະຂອງຕົນເອງໃນເອີຣົບເນື່ອງຈາກວ່າມັນເຮັດໃຫ້ມັນງ່າຍຂຶ້ນທີ່ຈະສະແດງໃຫ້ເຫັນວ່າລະບົບໄດ້ປະຕິບັດຕາມຂະບວນການທີ່ມີເຫດຜົນແລະສອດຄ່ອງກັບການປະຕິບັດຄວາມປອດໄພທາງຖະຫນົນທີ່ດີ.
ຮູບແບບເປີດໂດຍອີງໃສ່ NVIDIA Cosmos ເຫດຜົນ
ລັກສະນະທີ່ໂດດເດັ່ນອີກອັນໜຶ່ງຂອງ Alpamayo-R1 ແມ່ນລັກສະນະຂອງມັນ ຮູບແບບການຄົ້ນຄວ້າເປີດNVIDIA ໄດ້ສ້າງມັນຢູ່ເທິງພື້ນຖານຂອງ NVIDIA Cosmos ເຫດຜົນ, ເວທີທີ່ສຸມໃສ່ການໃຫ້ເຫດຜົນ AI ທີ່ອະນຸຍາດໃຫ້ປະສົມປະສານແຫຼ່ງຂໍ້ມູນທີ່ແຕກຕ່າງກັນແລະໂຄງສ້າງຂະບວນການຕັດສິນໃຈທີ່ສັບສົນ.
ຂໍຂອບໃຈກັບພື້ນຖານເຕັກໂນໂລຢີນີ້, ນັກຄົ້ນຄວ້າສາມາດ ປັບ AR1 ໃຫ້ກັບການທົດລອງແລະການທົດສອບຫຼາຍ ທີ່ບໍ່ມີຈຸດປະສົງທາງການຄ້າໂດຍກົງ, ຈາກການຈໍາລອງທາງວິຊາການຢ່າງດຽວກັບໂຄງການທົດລອງໂດຍການຮ່ວມມືກັບມະຫາວິທະຍາໄລ, ສູນເຕັກໂນໂລຢີຫຼືຜູ້ຜະລິດລົດໃຫຍ່.
ຮູບແບບຜົນປະໂຫຍດໂດຍສະເພາະຈາກ ການຮຽນຮູ້ເສີມເຕັກນິກນີ້ກ່ຽວຂ້ອງກັບການປັບປຸງລະບົບການປະຕິບັດໂດຍຜ່ານການທົດລອງແລະຄວາມຜິດພາດທີ່ແນະນໍາ, ໄດ້ຮັບລາງວັນຫຼືການລົງໂທດໂດຍອີງໃສ່ຄຸນນະພາບຂອງການຕັດສິນໃຈຂອງມັນ. ວິທີການນີ້ໄດ້ຖືກສະແດງໃຫ້ເຫັນເພື່ອເສີມຂະຫຍາຍການສົມເຫດສົມຜົນຂອງ AR1. ປັບປຸງວິທີການຕີຄວາມໝາຍຂອງສະພາບຈະລາຈອນຢ່າງກ້າວໜ້າ.
ການປະສົມປະສານຂອງຮູບແບບເປີດນີ້, ໂຄງສ້າງສົມເຫດສົມຜົນ, ແລະຕໍາແຫນ່ງການຝຶກອົບຮົມຂັ້ນສູງ Alpamayo-R1 ເປັນ ເວທີທີ່ດຶງດູດສໍາລັບຊຸມຊົນວິທະຍາສາດເອີຣົບມີຄວາມສົນໃຈທັງໃນການສຶກສາພຶດຕິກໍາຂອງລະບົບເອກະລາດແລະໃນການສໍາຫຼວດມາດຕະຖານຄວາມປອດໄພໃຫມ່ແລະກອບລະບຽບການ.
ໃນການປະຕິບັດ, ການມີຕົວແບບທີ່ສາມາດເຂົ້າເຖິງໄດ້ເຮັດໃຫ້ມັນງ່າຍຂຶ້ນສໍາລັບທີມງານຈາກປະເທດຕ່າງໆ ແບ່ງປັນຜົນໄດ້ຮັບ, ປຽບທຽບວິທີການແລະເລັ່ງການປະດິດສ້າງ ໃນການຂັບຂີ່ແບບອັດຕະໂນມັດ, ບາງສິ່ງບາງຢ່າງທີ່ສາມາດແປເປັນມາດຕະຖານທີ່ເຂັ້ມແຂງກວ່າສໍາລັບຕະຫຼາດເອີຣົບທັງຫມົດ.
ມີໃຫ້ຢູ່ໃນ GitHub, Hugging Face, ແລະຂໍ້ມູນເປີດ
NVIDIA ໄດ້ຢືນຢັນວ່າ Alpamayo-R1 ຈະມີໃຫ້ສາທາລະນະຜ່ານ GitHub ແລະ Hugging Face.ເຫຼົ່ານີ້ແມ່ນສອງເວທີຊັ້ນນໍາສໍາລັບການພັດທະນາແລະການແຈກຢາຍແບບຈໍາລອງທາງປັນຍາປະດິດ. ການເຄື່ອນໄຫວນີ້ອະນຸຍາດໃຫ້ທີມງານ R&D, startups, ແລະຫ້ອງທົດລອງສາທາລະນະສາມາດເຂົ້າເຖິງຮູບແບບໄດ້ໂດຍບໍ່ຈໍາເປັນຕ້ອງມີຂໍ້ຕົກລົງການຄ້າທີ່ສັບສົນ.
ຄຽງຄູ່ກັບຮູບແບບ, ບໍລິສັດຈະເຜີຍແຜ່ບາງສ່ວນຂອງຊຸດຂໍ້ມູນທີ່ໃຊ້ສໍາລັບການຝຶກອົບຮົມຂອງຕົນກ່ຽວກັບ NVIDIA Physical AI Open Datasetsຄໍເລັກຊັນໄດ້ສຸມໃສ່ສະຖານະການທາງກາຍະພາບແລະການຂັບລົດທີ່ມີປະໂຫຍດໂດຍສະເພາະສໍາລັບການເຮັດເລື້ມຄືນແລະຂະຫຍາຍການທົດລອງທີ່ດໍາເນີນພາຍໃນ.
ວິທີການເປີດນີ້ສາມາດຊ່ວຍໃຫ້ສະຖາບັນເອີຣົບ, ເຊັ່ນ: ສູນການຄົ້ນຄວ້າໃນການເຄື່ອນໄຫວ ຫຼືໂຄງການທີ່ໃຫ້ທຶນຈາກສະຫະພາບເອີຣົບລວມ AR1 ເຂົ້າໃນການທົດສອບຂອງທ່ານແລະປຽບທຽບການປະຕິບັດຂອງມັນກັບລະບົບອື່ນໆ. ມັນຍັງຈະເຮັດໃຫ້ງ່າຍຕໍ່ການປັບສະຖານະການການປະເມີນຜົນກັບລັກສະນະການຈະລາຈອນຂອງປະເທດຕ່າງໆ, ລວມທັງສະເປນ.
ການເຜີຍແຜ່ຢູ່ໃນບ່ອນເກັບມ້ຽນທີ່ຮູ້ຈັກກັນຢ່າງກວ້າງຂວາງເຮັດໃຫ້ມັນງ່າຍຂຶ້ນສໍາລັບນັກພັດທະນາ ແລະນັກວິທະຍາສາດ ກວດສອບພຶດຕິກໍາຂອງຕົວແບບ, ເພື່ອສະເຫນີການປັບປຸງແລະແບ່ງປັນເຄື່ອງມືເພີ່ມເຕີມ, ເສີມສ້າງຄວາມໂປ່ງໃສໃນຂົງເຂດທີ່ຄວາມໄວ້ວາງໃຈຂອງປະຊາຊົນແມ່ນພື້ນຖານ.
ສໍາລັບອຸດສາຫະກໍາລົດຍົນຂອງເອີຣົບ, ການມີຮູບແບບມາດຕະຖານທີ່ສາມາດເຂົ້າເຖິງໄດ້ເປັນຕົວແທນຂອງໂອກາດທີ່ຈະ ຮວມເງື່ອນໄຂການປະເມີນຜົນ ແລະທົດສອບອົງປະກອບຊອບແວຂັບຂີ່ແບບອັດຕະໂນມັດໃໝ່ບົນພື້ນຖານທົ່ວໄປ, ຫຼຸດຜ່ອນການຊໍ້າຊ້ອນ ແລະເລັ່ງການຫັນປ່ຽນຈາກຕົ້ນແບບໄປສູ່ສະພາບແວດລ້ອມຕົວຈິງ.
AlpaSim: ການປະເມີນປະສິດທິພາບ AR1 ໃນຫຼາຍສະຖານະການ
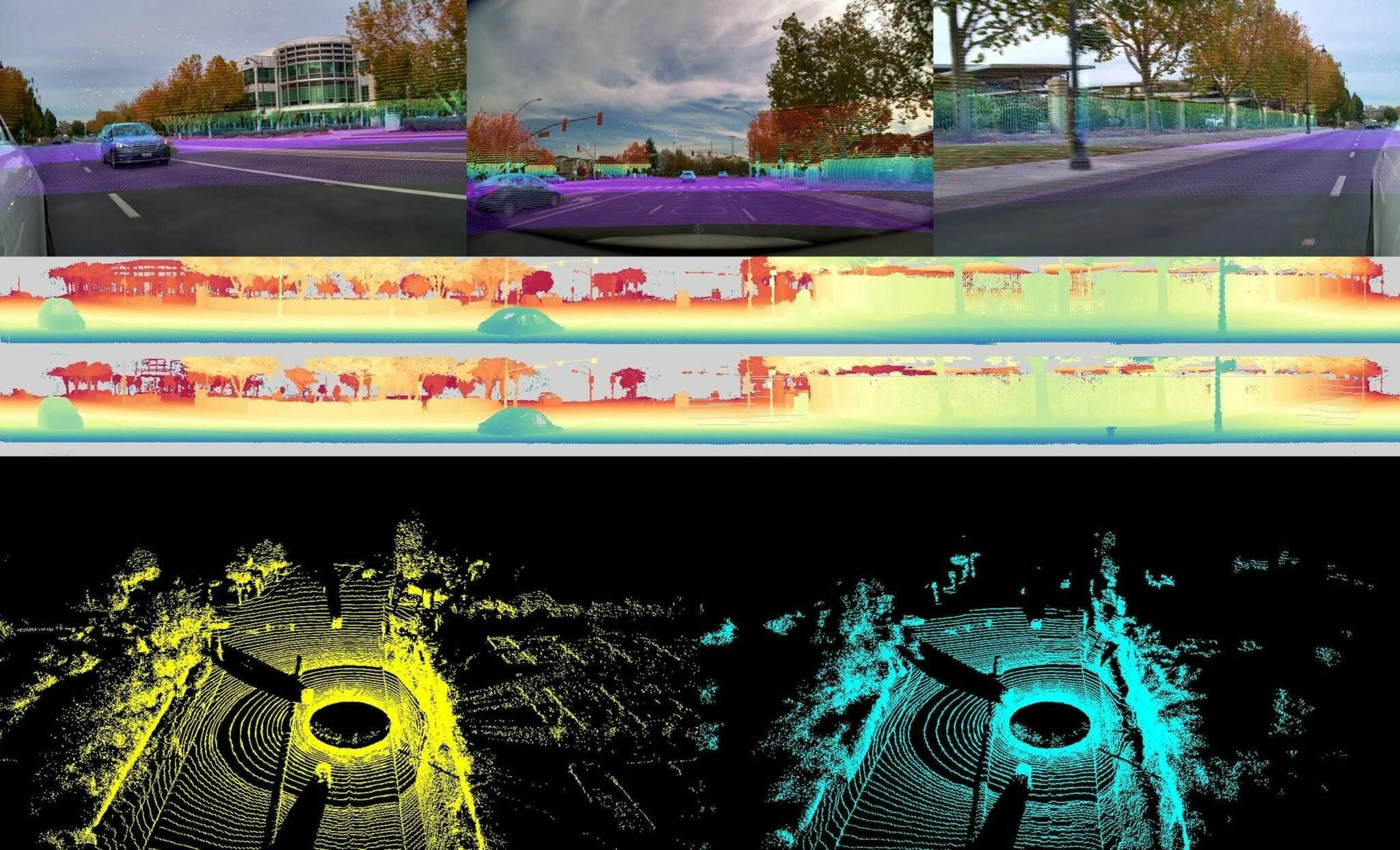
ຄຽງຄູ່ກັບ Alpamayo-R1, NVIDIA ໄດ້ນໍາສະເຫນີ AlpaSim, un ໂຄງຮ່າງການເປີດແຫຼ່ງທີ່ສ້າງຂຶ້ນເພື່ອທົດສອບຕົວແບບໃນຫຼາຍບໍລິບົດແນວຄວາມຄິດແມ່ນເພື່ອມີຫນຶ່ງ ເຄື່ອງມືການປະເມີນມາດຕະຖານ ທີ່ອະນຸຍາດໃຫ້ປຽບທຽບພຶດຕິກໍາຂອງ AR1 ໃນການຈະລາຈອນ, ສະພາບອາກາດແລະສະຖານະການອອກແບບຕົວເມືອງທີ່ແຕກຕ່າງກັນ.
ດ້ວຍ AlpaSim, ນັກຄົ້ນຄວ້າສາມາດສ້າງ ສະຖານະການສັງເຄາະ ແລະຈິງ ທີ່ replicate ທຸກສິ່ງທຸກຢ່າງຈາກທາງດ່ວນຫຼາຍເລນໄປຫາວົງວຽນປົກກະຕິໃນຕົວເມືອງເອີຣົບ, ລວມທັງເຂດທີ່ຢູ່ອາໄສທີ່ມີການສັນຈອນສະຫງົບຫຼືເຂດໂຮງຮຽນທີ່ມີຄົນຍ່າງຫຼາຍ.
ໂຄງຮ່າງການ ມັນໄດ້ຖືກອອກແບບເພື່ອວັດແທກທັງສອງ metrics ປະລິມານ (ເວລາຕິກິຣິຍາ, ໄລຍະທາງຄວາມປອດໄພ, ການປະຕິບັດຕາມກົດລະບຽບ) ເປັນຄຸນນະພາບ, ທີ່ກ່ຽວຂ້ອງກັບ ການໃຫ້ເຫດຜົນເທື່ອລະຂັ້ນຂອງ Alpamayo-R1 ແລະຄວາມສາມາດຂອງເຂົາເຈົ້າທີ່ຈະ justify ວ່າເປັນຫຍັງພວກເຂົາເຈົ້າໄດ້ເລືອກເສັ້ນທາງສະເພາະໃດຫນຶ່ງຫຼື maneuver.
ວິທີການນີ້ເຮັດໃຫ້ມັນງ່າຍຂຶ້ນສໍາລັບທີມງານເອີຣົບໃນການຈັດການທົດສອບຂອງເຂົາເຈົ້າກັບ ຂໍ້ກໍານົດກົດລະບຽບຂອງ EUເຊິ່ງປົກກະຕິແລ້ວຕ້ອງການຫຼັກຖານລາຍລະອຽດຂອງພຶດຕິກໍາຂອງລະບົບອັດຕະໂນມັດໃນສະພາບແວດລ້ອມທີ່ມີການຄວບຄຸມກ່ອນທີ່ຈະອະນຸຍາດໃຫ້ການທົດສອບທາງເປີດ.
ໃນຖານະເປັນວິທີສຸດທ້າຍ, AlpaSim ກາຍເປັນສິ່ງເສີມທໍາມະຊາດໃຫ້ກັບ AR1, ຍ້ອນວ່າມັນສະຫນອງສະພາບແວດລ້ອມທີ່ເຫມາະສົມສໍາລັບການ iterate, ປັບ, ແລະ validate ການປັບປຸງແບບຈໍາລອງໂດຍບໍ່ຈໍາເປັນຕ້ອງເປີດເຜີຍຜູ້ໃຊ້ທີ່ແທ້ຈິງກັບສະຖານະການທີ່ຍັງບໍ່ທັນໄດ້ທົດສອບພຽງພໍ.
ການປະສົມປະສານຂອງ ເປີດຕົວແບບ VLA, ຊຸດຂໍ້ມູນທາງກາຍະພາບ ແລະກອບການຈຳລອງ ນີ້ເຮັດໃຫ້ NVIDIA ຢູ່ໃນຕໍາແຫນ່ງທີ່ກ່ຽວຂ້ອງພາຍໃນການໂຕ້ວາທີກ່ຽວກັບວິທີຍານພາຫະນະອັດຕະໂນມັດໃນອະນາຄົດຄວນໄດ້ຮັບການທົດສອບແລະການຢັ້ງຢືນໃນເອີຣົບແລະ, ດ້ວຍການຂະຫຍາຍ, ໃນສ່ວນທີ່ເຫຼືອຂອງໂລກ.
ດ້ວຍອົງປະກອບທັງຫມົດເຫຼົ່ານີ້, Alpamayo-R1 ກໍາລັງກາຍເປັນເວທີທີ່ສໍາຄັນສໍາລັບຊຸມຊົນວິທະຍາສາດແລະອຸດສາຫະກໍາເພື່ອຄົ້ນຫາວິທີການໃຫມ່ຂອງການຂັບຂີ່ແບບອັດຕະໂນມັດ, ປະກອບສ່ວນ. ຄວາມໂປ່ງໃສ, ຄວາມສາມາດໃນການວິເຄາະ ແລະຄວາມປອດໄພຫຼາຍຂຶ້ນ ໄປສູ່ຂົງເຂດທີ່ຍັງຢູ່ພາຍໃຕ້ລະບຽບການ ແລະການພັດທະນາເຕັກໂນໂລຊີ.

ຂ້ອຍເປັນນັກເທັກໂນໂລຍີທີ່ກະຕືລືລົ້ນທີ່ໄດ້ຫັນຄວາມສົນໃຈ "geek" ຂອງລາວໄປສູ່ອາຊີບ. ຂ້າພະເຈົ້າໄດ້ໃຊ້ເວລາຫຼາຍກ່ວາ 10 ປີຂອງຊີວິດຂອງຂ້າພະເຈົ້າໂດຍການນໍາໃຊ້ເຕັກໂນໂລຊີທີ່ທັນສະໄຫມແລະ tinkering ກັບທຸກປະເພດຂອງໂຄງການອອກຈາກ curiosity ອັນບໍລິສຸດ. ຕອນນີ້ຂ້ອຍມີຄວາມຊ່ຽວຊານດ້ານເທັກໂນໂລຍີຄອມພິວເຕີ ແລະເກມວີດີໂອ. ນີ້ແມ່ນຍ້ອນວ່າຫຼາຍກວ່າ 5 ປີທີ່ຂ້ອຍໄດ້ຂຽນສໍາລັບເວັບໄຊທ໌ຕ່າງໆກ່ຽວກັບເຕັກໂນໂລຢີແລະວິດີໂອເກມ, ການສ້າງບົດຄວາມທີ່ຊອກຫາເພື່ອໃຫ້ທ່ານມີຂໍ້ມູນທີ່ທ່ານຕ້ອງການໃນພາສາທີ່ທຸກຄົນເຂົ້າໃຈໄດ້.
ຖ້າທ່ານມີຄໍາຖາມໃດໆ, ຄວາມຮູ້ຂອງຂ້ອຍແມ່ນມາຈາກທຸກສິ່ງທຸກຢ່າງທີ່ກ່ຽວຂ້ອງກັບລະບົບປະຕິບັດການ Windows ເຊັ່ນດຽວກັນກັບ Android ສໍາລັບໂທລະສັບມືຖື. ແລະຄໍາຫມັ້ນສັນຍາຂອງຂ້າພະເຈົ້າແມ່ນກັບທ່ານ, ຂ້າພະເຈົ້າສະເຫມີເຕັມໃຈທີ່ຈະໃຊ້ເວລາສອງສາມນາທີແລະຊ່ວຍທ່ານແກ້ໄຂຄໍາຖາມໃດໆທີ່ທ່ານອາດຈະມີຢູ່ໃນໂລກອິນເຕີເນັດນີ້.