- Alpamayo-R1 ir pirmais VLA redzes-valodas-darbības modelis, kas orientēts uz autonomiem transportlīdzekļiem.
- Integrē pakāpenisku spriešanu maršruta plānošanā, lai risinātu sarežģītus scenārijus.
- Tas ir atvērts modelis, kas balstīts uz NVIDIA Cosmos Reason un ir pieejams GitHub un Hugging Face.
- AlpaSim un fiziskā mākslīgā intelekta atvērto datu kopas stiprina validāciju un eksperimentus ar AR1.

Autonomās braukšanas ekosistēma sper soli uz priekšu ar ienākšanu PIEDZIŅA Alpamayo-R1 (AR1), mākslīgā intelekta modelis, kas izstrādāts tā, lai transportlīdzekļi ne tikai "redzētu" vidi, bet arī to saprastu un rīkotos atbilstoši. Šis jaunais NVIDIA izstrādājums Tas tiek pozicionēts kā nozares etalons, īpaši tādos tirgos kā Eiropa un Spānijakur noteikumi un ceļu satiksmes drošība ir īpaši stingri.
Šis jaunais NVIDIA izstrādājums tiek prezentēts kā pirmais VLA modelis (redze-valoda-darbība) atvērtas spriešanas, kas īpaši vērsta uz pētījumi par autonomiem transportlīdzekļiemAlpamayo-R1 ne tikai apstrādā sensoru datus, bet arī ietver strukturētas spriešanas iespējas, kas ir būtiskas, lai virzītos uz augstāku autonomijas līmeni, nezaudējot no redzesloka pārredzamību un drošību lēmumu pieņemšanā.
Kas ir Alpamayo-R1 un kāpēc tas iezīmē pagrieziena punktu?

Alpamayo-R1 ir daļa no jaunās paaudzes mākslīgā intelekta modeļiem, kas apvieno datorredze, dabiskās valodas apstrāde un konkrētas darbībasŠī VLA pieeja ļauj sistēmai saņemt vizuālu informāciju (kameras, sensori), aprakstīt un izskaidrot to valodā un sasaistīt ar reāliem braukšanas lēmumiem, visu veicot vienā un tajā pašā spriešanas plūsmā.
Kamēr citi autonomās braukšanas modeļi aprobežojās ar reaģēšanu uz jau apgūtiem modeļiem, AR1 koncentrējas uz pakāpeniska spriešana vai domu ķēdetieši integrējot to maršruta plānošanā. Tas nozīmē, ka transportlīdzeklis var garīgi analizēt sarežģītu situāciju, izvērtēt iespējas un iekšēji pamatot, kāpēc tas izvēlas konkrētu manevru, tādējādi atvieglojot izmeklētājiem un regulatoriem novērtēšanu.
NVIDIA likme ar Alpamayo-R1 sniedzas tālāk par vadības algoritmu uzlabošanu: mērķis ir vadīt Mākslīgais intelekts, kas spēj izskaidrot savu uzvedībuTas ir īpaši aktuāli tādās teritorijās kā Eiropas Savienība, kur arvien vairāk tiek vērtēta automatizētu lēmumu izsekojamība un tehnoloģiskā atbildība transporta jomā.
Tādējādi AR1 nav tikai uzlabots uztveres modelis, bet gan rīks, kas paredzēts, lai risinātu lielo izaicinājumu droša un cilvēkam draudzīga autonomā braukšanaŠis aspekts būs izšķirošs tā faktiskai ieviešanai uz Eiropas ceļiem.
Spriešana reālās dzīves situācijās un sarežģītā vidē
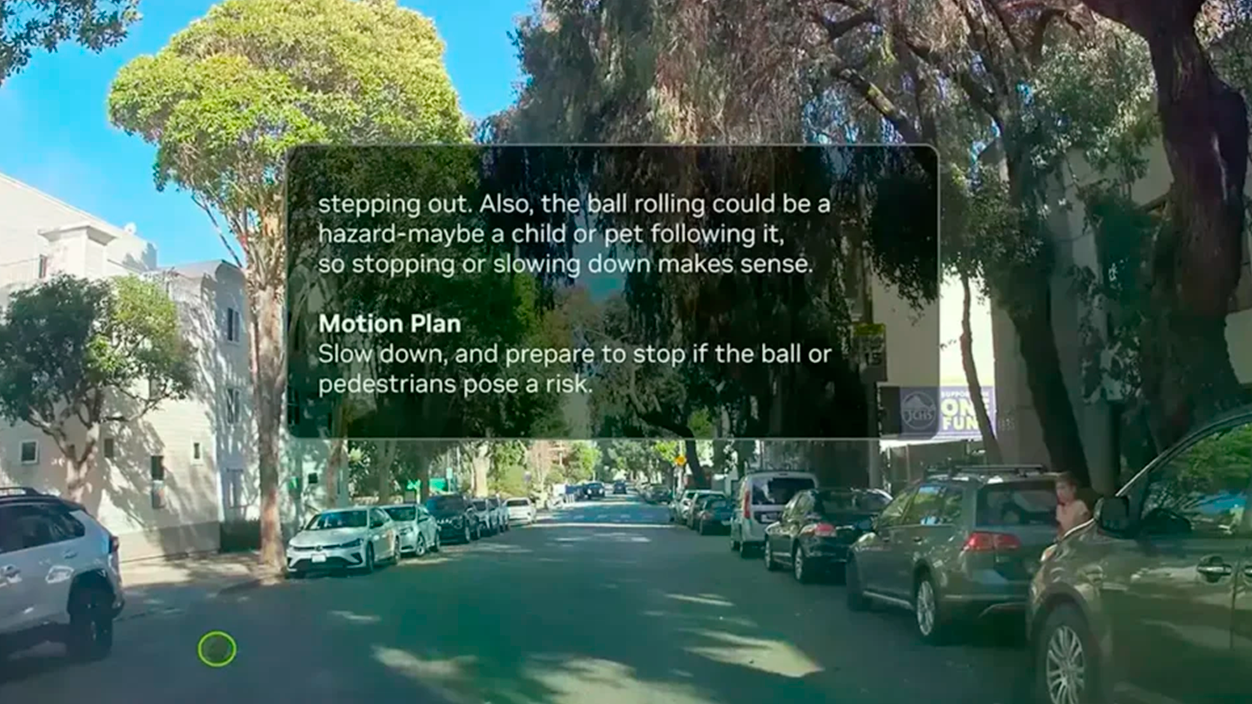
Viena no Alpamayo-R1 stiprajām pusēm ir tā spēja tikt galā pilsētvide, kas pilna ar niansēmturpretī iepriekšējiem modeļiem parasti bija vairāk problēmu. Pārejas, kurās gājēji vilcinās un tuvojas gājēju pārejai, slikti novietotas automašīnas, kas aizņem daļu joslas, vai pēkšņi ceļu slēgumi ir piemēri situācijām, kad vienkārša objektu noteikšana nav pietiekama.
Šāda veida vidēs AR1 sadala ainu mazi spriešanas soļiŅemot vērā gājēju kustību, citu transportlīdzekļu novietojumu, norādes un tādus elementus kā velosipēdu joslas vai iekraušanas un izkraušanas zonas. Pēc tam, Tā izvērtē dažādus iespējamos ceļus un izvēlas to, ko uzskata par drošāko un piemērotāko. en Tiempo reāls.
Ja autonoma automašīna brauc, piemēram, pa šauru Eiropas ielu ar paralēlu velosipēdu joslu un daudziem gājējiem, Alpamayo-R1 var analizēt katru maršruta segmentu, izskaidrot novērotos datus un to, kā katrs faktors ir ietekmējis tā lēmumu. lai samazinātu ātrumu, palielinātu sānu distanci vai nedaudz mainītu trajektoriju.
Šāds detalizācijas līmenis ļauj pētniecības un attīstības komandām pārskatīt modeļa iekšējā spriešanaTas ļauj identificēt potenciālas kļūdas vai neobjektivitātes un pielāgot gan apmācības datus, gan vadības noteikumus. Eiropas pilsētām ar to vēsturiskajiem centriem, neregulāru ielu izkārtojumu un ļoti mainīgu satiksmi šī elastība ir īpaši vērtīga.
Turklāt šī spēja pamatot savu izvēli paver durvis labākai integrācijai ar turpmākajiem noteikumiem. autonomie transportlīdzekļi Eiropājo tas atvieglo pierādīšanu, ka sistēma ir ievērojusi loģisku procesu un ir saskaņota ar labu ceļu satiksmes drošības praksi.
Atvērts modelis, kura pamatā ir NVIDIA Cosmos Reason
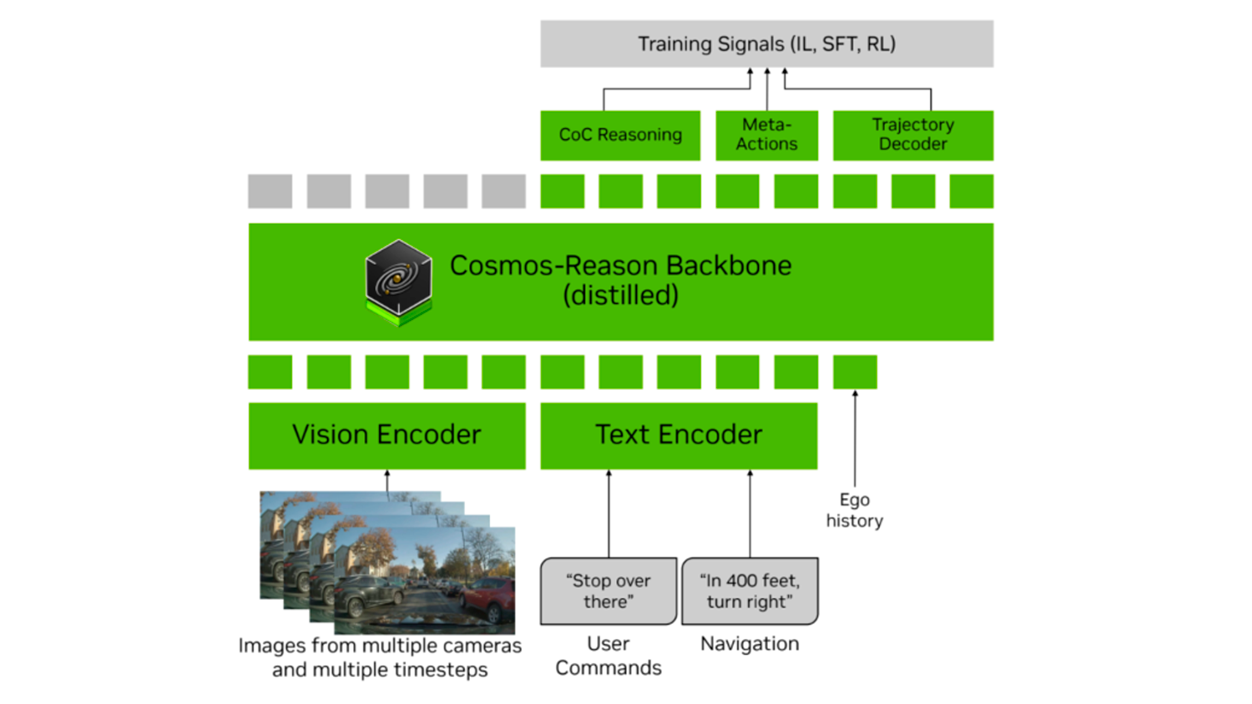
Vēl viena Alpamayo-R1 atšķirīga iezīme ir tā raksturs atvērta, uz pētniecību orientēta modeļaNVIDIA to ir izveidojusi uz pamatiem NVIDIA Cosmos Reason, platforma, kas koncentrējas uz mākslīgā intelekta spriešanu, kas ļauj apvienot dažādus informācijas avotus un strukturēt sarežģītus lēmumu pieņemšanas procesus.
Pateicoties šai tehnoloģiskajai bāzei, pētnieki var pielāgot AR1 vairākiem eksperimentiem un testiem kuriem nav tiešu komerciālu mērķu, sākot no tīri akadēmiskām simulācijām līdz pilotprojektiem sadarbībā ar universitātēm, tehnoloģiju centriem vai automašīnu ražotājiem.
Modelis jo īpaši gūst labumu no mācība pastiprinātŠī metode ietver sistēmas veiktspējas uzlabošanu, izmantojot vadītu izmēģinājumu un kļūdu metodi, saņemot atlīdzības vai sodus, pamatojoties uz pieņemto lēmumu kvalitāti. Ir pierādīts, ka šī pieeja uzlabo AR1 spriešanas spējas. pakāpeniski pilnveidojot savu ceļu satiksmes situāciju interpretāciju.
Šī atvērtā modeļa, strukturētas spriešanas un padziļinātas apmācības kombinācija pozicionē Alpamayo-R1 kā pievilcīga platforma Eiropas zinātnieku aprindām, interesējoties gan par autonomo sistēmu uzvedības izpēti, gan par jaunu drošības standartu un normatīvo regulējumu izpēti.
Praksē pieejams modelis atvieglo komandām no dažādām valstīm dalīties rezultātos, salīdzināt pieejas un paātrināt inovācijas autonomās braukšanas jomā, kas varētu novest pie stingrākiem standartiem visā Eiropas tirgū.
Pieejamība GitHub, Hugging Face un atvērtajos datos
NVIDIA ir apstiprinājusi, ka Alpamayo-R1 būs publiski pieejams, izmantojot GitHub un Hugging Face.Šīs ir divas no vadošajām platformām mākslīgā intelekta modeļu izstrādei un izplatīšanai. Šis solis ļauj pētniecības un attīstības komandām, jaunuzņēmumiem un publiskajām laboratorijām piekļūt modelim bez nepieciešamības slēgt sarežģītus komerciālus līgumus.
Kopā ar modeli uzņēmums publicēs daļu no datu kopām, kas izmantotas tā apmācībā. NVIDIA fiziskā mākslīgā intelekta atvērtie datu kopumiKolekcijas, kas koncentrējas uz fiziskiem un braukšanas scenārijiem, kuri ir īpaši noderīgi iekšēji veiktu eksperimentu atkārtošanai un paplašināšanai.
Šī atvērtā pieeja var palīdzēt Eiropas iestādēm, piemēram, pētniecības centri mobilitātes vai ES finansētos projektosIntegrējiet AR1 savos testos un salīdziniet tā veiktspēju ar citām sistēmām. Tas arī atvieglos novērtēšanas scenāriju pielāgošanu dažādu valstu, tostarp Spānijas, satiksmes raksturlielumiem.
Publicēšana plaši pazīstamās krātuvēs atvieglo izstrādātājiem un zinātniekiem pārbaudīt modeļa darbību, lai ierosinātu uzlabojumus un dalītos ar papildu rīkiem, stiprinot pārredzamību jomā, kurā sabiedrības uzticēšanās ir būtiska.
Eiropas autobūves nozarei pieejama etalona modeļa esamība sniedz iespēju vienādot vērtēšanas kritērijus un kopīgi testēt jaunas autonomās braukšanas programmatūras komponentes, samazinot dublēšanos un paātrinot pāreju no prototipiem uz reālu vidi.
AlpaSim: AR1 veiktspējas novērtēšana vairākos scenārijos
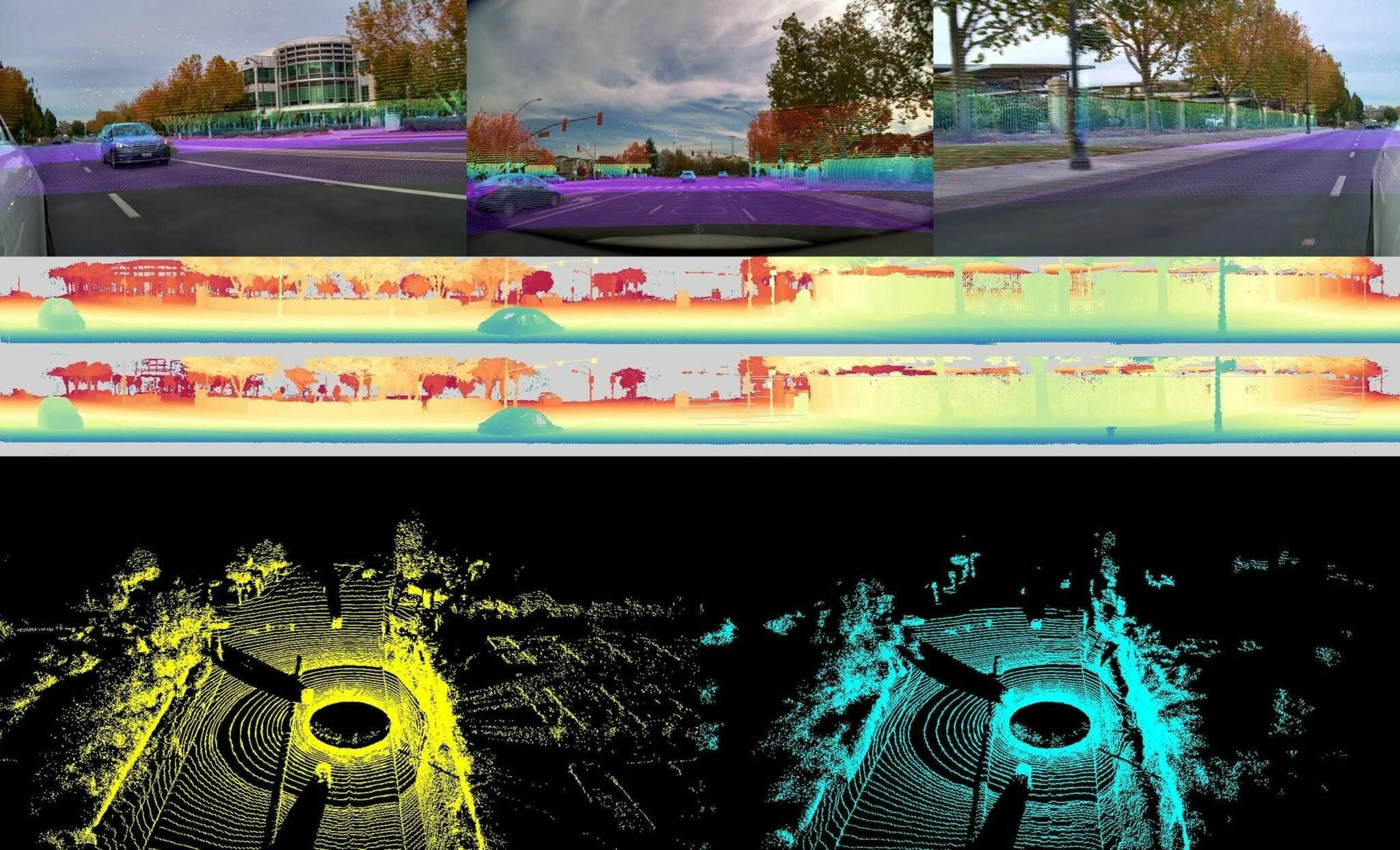
Līdzās Alpamayo-R1, NVIDIA ir prezentējusi AlpaSim, Viena atvērtā pirmkoda ietvars, kas izveidots, lai pārbaudītu modeli dažādos kontekstosIdeja ir tāda, standartizēts novērtēšanas rīks kas ļauj salīdzināt AR1 uzvedību dažādās satiksmes, laikapstākļu un pilsētplānošanas situācijās.
Ar AlpaSim, pētnieki var ģenerēt sintētiski un reālistiski scenāriji kas atdarina visu, sākot no daudzjoslu automaģistrālēm līdz tipiskiem apļveida krustojumiem Eiropas pilsētās, tostarp dzīvojamos rajonus ar satiksmes mierināšanu vai skolu zonas ar lielu gājēju skaitu.
Sistēma Tas ir paredzēts gan kvantitatīvu rādītāju mērīšanai, gan (reakcijas laiks, drošības distance, noteikumu ievērošana) kā kvalitatīvs, kas saistīti ar Alpamayo-R1 pakāpeniska spriešana un viņu spēju pamatot, kāpēc viņi ir izvēlējušies konkrētu maršrutu vai manevru.
Šī pieeja atvieglo Eiropas komandām savu testu saskaņošanu ar ES normatīvās prasībaskas parasti prasa detalizētus pierādījumus par autonomo sistēmu uzvedību kontrolētā vidē, pirms atļaujas piešķiršanas atklāta ceļa testiem.
Galu galā AlpaSim kļūst par dabisku AR1 papildinājumu, jo tā piedāvā ideālu vidi atkārtot, pielāgot un validēt modeļa uzlabojumi, nepakļaujot reālus lietotājus situācijām, kas vēl nav pietiekami pārbaudītas.
Kombinācija atvērtais VLA modelis, fizisko datu kopas un simulācijas ietvars Tas nostāda NVIDIA atbilstošā pozīcijā debatēs par to, kā nākotnes autonomie transportlīdzekļi būtu jātestē un jāsertificē Eiropā un, līdz ar to, pārējā pasaulē.
Ar visiem šiem elementiem Alpamayo-R1 kļūst par galveno platformu zinātnieku aprindām un nozarei, lai izpētītu jaunus automatizētas braukšanas veidus, sniedzot ieguldījumu lielāka pārredzamība, analītiskās spējas un drošība jomā, kas joprojām atrodas regulējuma un tehnoloģiju attīstības stadijā.

Esmu tehnoloģiju entuziasts, kurš savas "geek" intereses ir pārvērtis profesijā. Es esmu pavadījis vairāk nekā 10 gadus no savas dzīves, izmantojot jaunākās tehnoloģijas un tīri ziņkārības vadīts ar visu veidu programmām. Tagad esmu specializējies datortehnoloģijās un videospēlēs. Tas ir tāpēc, ka vairāk nekā 5 gadus esmu rakstījis dažādām tīmekļa vietnēm par tehnoloģijām un videospēlēm, veidojot rakstus, kuru mērķis ir sniegt jums nepieciešamo informāciju ikvienam saprotamā valodā.
Ja jums ir kādi jautājumi, manas zināšanas svārstās no visa, kas saistīts ar Windows operētājsistēmu, kā arī Android mobilajiem tālruņiem. Un mana apņemšanās ir jums, es vienmēr esmu gatavs veltīt dažas minūtes un palīdzēt jums atrisināt visus jautājumus, kas jums varētu rasties šajā interneta pasaulē.