- സ്വയംഭരണ വാഹനങ്ങളെ ലക്ഷ്യം വച്ചുള്ള ആദ്യത്തെ വിഷൻ-ലാംഗ്വേജ്-ആക്ഷൻ VLA മോഡലാണ് അൽപമയോ-ആർ1.
- സങ്കീർണ്ണമായ സാഹചര്യങ്ങളെ അഭിസംബോധന ചെയ്യുന്നതിനായി റൂട്ട് പ്ലാനിംഗിൽ ഘട്ടം ഘട്ടമായുള്ള ന്യായവാദം സംയോജിപ്പിക്കുന്നു.
- ഇത് NVIDIA Cosmos Reason അടിസ്ഥാനമാക്കിയുള്ള ഒരു ഓപ്പൺ മോഡലാണ്, കൂടാതെ GitHub, Hugging Face എന്നിവയിൽ ലഭ്യമാണ്.
- ആൽപാസിമും ഫിസിക്കൽ എഐ ഓപ്പൺ ഡാറ്റാസെറ്റുകളും AR1 ഉപയോഗിച്ചുള്ള മൂല്യനിർണ്ണയവും പരീക്ഷണവും ശക്തിപ്പെടുത്തുന്നു.

വരവോടെ ഓട്ടോണമസ് ഡ്രൈവിംഗ് ഇക്കോസിസ്റ്റം ഒരു പടി മുന്നോട്ട് പോകുന്നു ഡ്രൈവ് അൽപമയോ-R1 (AR1), വാഹനങ്ങൾ പരിസ്ഥിതിയെ "കാണാൻ" മാത്രമല്ല, അത് മനസ്സിലാക്കാനും അതിനനുസരിച്ച് പ്രവർത്തിക്കാനും കഴിയുന്ന തരത്തിൽ രൂപകൽപ്പന ചെയ്ത ഒരു കൃത്രിമ ബുദ്ധി മാതൃക. NVIDIA-യിൽ നിന്നുള്ള ഈ പുതിയ വികസനം പ്രത്യേകിച്ച് ഇതുപോലുള്ള വിപണികളിൽ, ഈ മേഖലയ്ക്ക് ഒരു മാനദണ്ഡമായി ഇത് സ്ഥാനം പിടിച്ചിരിക്കുന്നു യൂറോപ്പും സ്പെയിനുംനിയന്ത്രണങ്ങളും റോഡ് സുരക്ഷയും പ്രത്യേകിച്ച് കർശനമായിരിക്കുന്നിടത്ത്.
NVIDIA യിൽ നിന്നുള്ള ഈ പുതിയ വികസനം ഇങ്ങനെയാണ് അവതരിപ്പിക്കുന്നത് ആദ്യത്തെ VLA മോഡൽ (ദർശനം-ഭാഷ-പ്രവർത്തനം) പ്രത്യേകമായി ശ്രദ്ധ കേന്ദ്രീകരിച്ച തുറന്ന യുക്തിയുടെ സ്വയംഭരണ വാഹനങ്ങളെക്കുറിച്ചുള്ള ഗവേഷണംസെൻസർ ഡാറ്റ പ്രോസസ്സ് ചെയ്യുന്നതിനുപകരം, അൽപമയോ-ആർ1 ഘടനാപരമായ യുക്തിസഹമായ കഴിവുകൾ ഉൾക്കൊള്ളുന്നു, ഇത് തീരുമാനമെടുക്കലിൽ സുതാര്യതയും സുരക്ഷയും നഷ്ടപ്പെടുത്താതെ ഉയർന്ന തലത്തിലുള്ള സ്വയംഭരണത്തിലേക്ക് നീങ്ങുന്നതിന് പ്രധാനമാണ്.
അൽപമയോ-ആർ1 എന്താണ്, അത് ഒരു വഴിത്തിരിവായി മാറുന്നത് എന്തുകൊണ്ട്?

സംയോജിപ്പിക്കുന്ന ഒരു പുതിയ തലമുറ AI മോഡലുകളുടെ ഭാഗമാണ് Alpamayo-R1 കമ്പ്യൂട്ടർ ദർശനം, സ്വാഭാവിക ഭാഷാ പ്രോസസ്സിംഗ്, കോൺക്രീറ്റ് പ്രവർത്തനങ്ങൾഈ VLA സമീപനം സിസ്റ്റത്തിന് ദൃശ്യ വിവരങ്ങൾ (ക്യാമറകൾ, സെൻസറുകൾ) സ്വീകരിക്കാനും, ഭാഷയിൽ വിവരിക്കാനും വിശദീകരിക്കാനും, യഥാർത്ഥ ഡ്രൈവിംഗ് തീരുമാനങ്ങളുമായി ബന്ധിപ്പിക്കാനും അനുവദിക്കുന്നു, എല്ലാം ഒരേ യുക്തിസഹമായ പ്രവാഹത്തിനുള്ളിൽ.
മറ്റ് ഓട്ടോണമസ് ഡ്രൈവിംഗ് മോഡലുകൾ ഇതിനകം പഠിച്ച പാറ്റേണുകളോട് പ്രതികരിക്കുന്നതിൽ പരിമിതപ്പെടുത്തിയിരുന്നെങ്കിലും, AR1 ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നത് ഘട്ടം ഘട്ടമായുള്ള ന്യായവാദം അല്ലെങ്കിൽ ചിന്താ ശൃംഖലറൂട്ട് പ്ലാനിംഗിൽ നേരിട്ട് സംയോജിപ്പിക്കുക. ഇതിനർത്ഥം വാഹനത്തിന് സങ്കീർണ്ണമായ ഒരു സാഹചര്യത്തെ മാനസികമായി തകർക്കാനും, ഓപ്ഷനുകൾ വിലയിരുത്താനും, ഒരു പ്രത്യേക തന്ത്രം തിരഞ്ഞെടുക്കുന്നതിന്റെ കാരണം ആന്തരികമായി ന്യായീകരിക്കാനും കഴിയും, ഇത് അന്വേഷകർക്കും നിയന്ത്രണ ഉദ്യോഗസ്ഥർക്കും വിലയിരുത്തുന്നത് എളുപ്പമാക്കുന്നു.
ആൽപമയോ-ആർ1 യുമായുള്ള എൻവിഡിയയുടെ പന്തയം നിയന്ത്രണ അൽഗോരിതം മെച്ചപ്പെടുത്തുന്നതിനപ്പുറം പോകുന്നു: ലക്ഷ്യം ഒരു ഡ്രൈവ് ചെയ്യുക എന്നതാണ്. അതിന്റെ സ്വഭാവം വിശദീകരിക്കാൻ കഴിവുള്ള AIഗതാഗത മേഖലയിലെ ഓട്ടോമേറ്റഡ് തീരുമാനങ്ങളുടെയും സാങ്കേതിക ഉത്തരവാദിത്തത്തിന്റെയും കണ്ടെത്തൽ കൂടുതൽ വിലമതിക്കപ്പെടുന്ന യൂറോപ്യൻ യൂണിയൻ പോലുള്ള പ്രദേശങ്ങളിൽ ഇത് പ്രത്യേകിച്ചും പ്രസക്തമാണ്.
അങ്ങനെ, AR1 വെറുമൊരു നൂതന പെർസെപ്ഷൻ മോഡൽ മാത്രമല്ല, മറിച്ച് വലിയ വെല്ലുവിളിയെ നേരിടാൻ രൂപകൽപ്പന ചെയ്ത ഒരു ഉപകരണമാണ് സുരക്ഷിതവും മനുഷ്യസൗഹൃദവുമായ സ്വയംഭരണ ഡ്രൈവിംഗ്യൂറോപ്യൻ റോഡുകളിൽ ഇത് യഥാർത്ഥത്തിൽ സ്വീകരിക്കുന്നതിന് നിർണായകമായ ഒരു വശമാണിത്.
യഥാർത്ഥ ജീവിത സാഹചര്യങ്ങളിലും സങ്കീർണ്ണമായ ചുറ്റുപാടുകളിലും ന്യായവാദം.
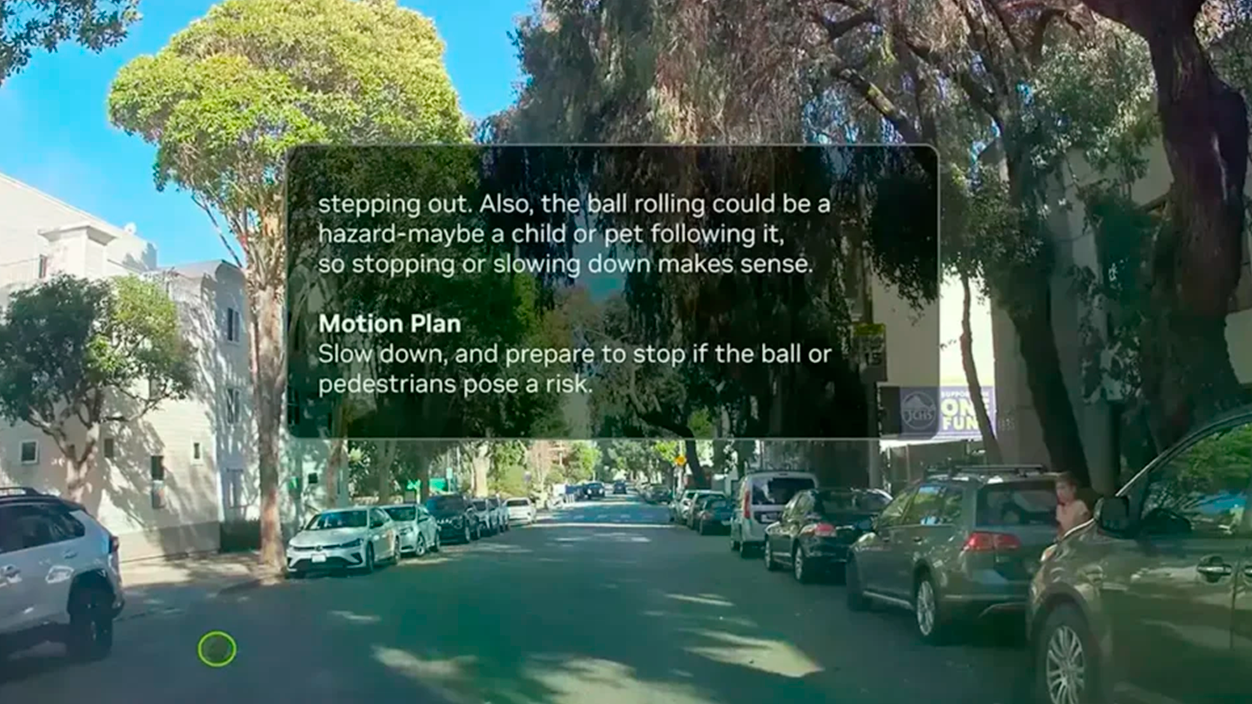
ആൽപമയോ-ആർ1 ന്റെ ശക്തികളിൽ ഒന്ന് അതിന്റെ കൈകാര്യം ചെയ്യാനുള്ള കഴിവ് സൂക്ഷ്മതകൾ നിറഞ്ഞ നഗര സാഹചര്യങ്ങൾമുൻ മോഡലുകൾക്ക് കൂടുതൽ പ്രശ്നങ്ങൾ ഉണ്ടാകാൻ സാധ്യതയുള്ള സ്ഥലങ്ങൾ. കാൽനടയാത്രക്കാർ മടിച്ചുനിൽക്കുന്ന രീതിയിൽ ഒരു ക്രോസ്വാക്കിലേക്ക് അടുക്കുന്നത്, മോശമായി പാർക്ക് ചെയ്തിരിക്കുന്ന വാഹനങ്ങൾ ലെയ്നിന്റെ ഒരു ഭാഗം കൈവശപ്പെടുത്തുന്നത്, അല്ലെങ്കിൽ പെട്ടെന്ന് റോഡ് അടച്ചിടുന്നത് എന്നിവ ലളിതമായ വസ്തുക്കൾ കണ്ടെത്തൽ മാത്രം പോരാ എന്ന സാഹചര്യങ്ങളുടെ ഉദാഹരണങ്ങളാണ്.
ഇത്തരം പരിതസ്ഥിതികളിൽ, AR1 രംഗം ഇങ്ങനെ വിഭജിക്കുന്നു യുക്തിയുടെ ചെറിയ ഘട്ടങ്ങൾകാൽനടയാത്രക്കാരുടെ ചലനം, മറ്റ് വാഹനങ്ങളുടെ സ്ഥാനം, സൈനേജുകൾ, ബൈക്ക് ലെയ്നുകൾ അല്ലെങ്കിൽ ലോഡിംഗ്, അൺലോഡിംഗ് സോണുകൾ പോലുള്ള ഘടകങ്ങൾ എന്നിവ കണക്കിലെടുത്ത്. അവിടെ നിന്ന്, ഇത് സാധ്യമായ വ്യത്യസ്ത പാതകൾ വിലയിരുത്തുകയും ഏറ്റവും സുരക്ഷിതവും ഉചിതവുമാണെന്ന് കരുതുന്ന ഒന്ന് തിരഞ്ഞെടുക്കുകയും ചെയ്യുന്നു. തത്സമയം
ഒരു സ്വയംഭരണ കാർ ഓടിക്കുന്നുണ്ടെങ്കിൽ, ഉദാഹരണത്തിന്, സമാന്തര ബൈക്ക് പാതയും നിരവധി കാൽനടയാത്രക്കാരും ഉള്ള ഒരു ഇടുങ്ങിയ യൂറോപ്യൻ തെരുവിലൂടെ, അൽപമയോ-ആർ1 ന് റൂട്ടിന്റെ ഓരോ സെഗ്മെന്റും വിശകലനം ചെയ്യാനും, അത് എന്താണ് നിരീക്ഷിച്ചതെന്നും, ഓരോ ഘടകവും അതിന്റെ തീരുമാനത്തെ എങ്ങനെ സ്വാധീനിച്ചുവെന്നും വിശദീകരിക്കാൻ കഴിയും. വേഗത കുറയ്ക്കുക, ലാറ്ററൽ ദൂരം വർദ്ധിപ്പിക്കുക, അല്ലെങ്കിൽ പാത ചെറുതായി പരിഷ്കരിക്കുക.
ആ തലത്തിലുള്ള വിശദാംശങ്ങൾ ഗവേഷണ വികസന സംഘങ്ങൾക്ക് അവലോകനം ചെയ്യാൻ അനുവദിക്കുന്നു മോഡലിന്റെ ആന്തരിക യുക്തിഇത് സാധ്യമായ പിശകുകളോ പക്ഷപാതങ്ങളോ തിരിച്ചറിയുന്നതിനും പരിശീലന ഡാറ്റയുടെയും നിയന്ത്രണ നിയമങ്ങളുടെയും ക്രമീകരണത്തിനും അനുവദിക്കുന്നു. ചരിത്രപരമായ കേന്ദ്രങ്ങൾ, ക്രമരഹിതമായ തെരുവ് ലേഔട്ടുകൾ, ഉയർന്ന വേരിയബിൾ ട്രാഫിക് എന്നിവയുള്ള യൂറോപ്യൻ നഗരങ്ങൾക്ക്, ഈ വഴക്കം പ്രത്യേകിച്ചും വിലപ്പെട്ടതാണ്.
കൂടാതെ, അവരുടെ തിരഞ്ഞെടുപ്പുകളെ ന്യായീകരിക്കാനുള്ള ഈ കഴിവ് ഭാവിയിലെ നിയന്ത്രണങ്ങളുമായി മികച്ച സംയോജനത്തിനുള്ള വാതിൽ തുറക്കുന്നു. യൂറോപ്പിലെ സ്വയംഭരണ വാഹനങ്ങൾകാരണം, സിസ്റ്റം ഒരു യുക്തിസഹമായ പ്രക്രിയ പിന്തുടർന്നിട്ടുണ്ടെന്നും നല്ല റോഡ് സുരക്ഷാ രീതികളുമായി യോജിപ്പിച്ചിട്ടുണ്ടെന്നും തെളിയിക്കുന്നത് എളുപ്പമാക്കുന്നു.
NVIDIA Cosmos Reason അടിസ്ഥാനമാക്കിയുള്ള ഓപ്പൺ മോഡൽ
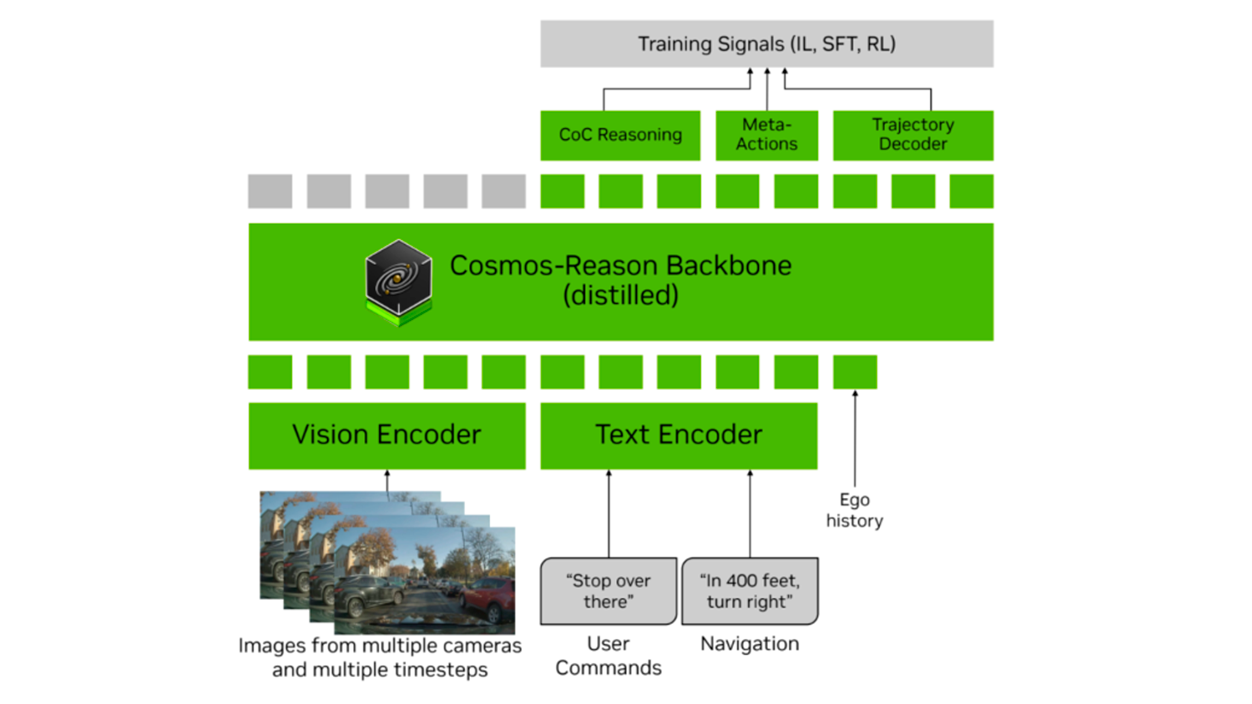
ആൽപമയോ-ആർ1 ന്റെ മറ്റൊരു സവിശേഷത അതിന്റെ സ്വഭാവമാണ് തുറന്ന ഗവേഷണാധിഷ്ഠിത മാതൃകNVIDIA ഇത് നിർമ്മിച്ചിരിക്കുന്നത് എൻവിഡിയ കോസ്മോസിന്റെ കാരണംവ്യത്യസ്ത വിവര സ്രോതസ്സുകൾ സംയോജിപ്പിക്കുന്നതിനും സങ്കീർണ്ണമായ തീരുമാന പ്രക്രിയകൾ രൂപപ്പെടുത്തുന്നതിനും അനുവദിക്കുന്ന AI യുക്തിയിൽ ശ്രദ്ധ കേന്ദ്രീകരിച്ച ഒരു പ്ലാറ്റ്ഫോമാണ് ഇത്.
ഈ സാങ്കേതിക അടിത്തറയ്ക്ക് നന്ദി, ഗവേഷകർക്ക് കഴിയും ഒന്നിലധികം പരീക്ഷണങ്ങൾക്കും പരീക്ഷണങ്ങൾക്കും AR1 അനുയോജ്യമാക്കുക സർവകലാശാലകൾ, സാങ്കേതിക കേന്ദ്രങ്ങൾ അല്ലെങ്കിൽ കാർ നിർമ്മാതാക്കൾ എന്നിവരുമായി സഹകരിച്ചുള്ള പൈലറ്റ് പ്രോജക്ടുകൾ ഉൾപ്പെടെ പൂർണ്ണമായും അക്കാദമിക് സിമുലേഷനുകൾ മുതൽ നേരിട്ടുള്ള വാണിജ്യ ലക്ഷ്യങ്ങളില്ലാത്തവ.
ഈ മോഡലിന് പ്രത്യേകിച്ച് പ്രയോജനം ലഭിക്കുന്നത് ശക്തിപ്പെടുത്തൽ പഠനംഗൈഡഡ് ട്രയൽ ആൻഡ് എറർ വഴി സിസ്റ്റം അതിന്റെ പ്രകടനം മെച്ചപ്പെടുത്തുക, തീരുമാനങ്ങളുടെ ഗുണനിലവാരത്തെ അടിസ്ഥാനമാക്കി പ്രതിഫലങ്ങളോ പിഴകളോ സ്വീകരിക്കുക എന്നിവയാണ് ഈ സാങ്കേതിക വിദ്യയിൽ ഉൾപ്പെടുന്നത്. ഈ സമീപനം AR1 ന്റെ യുക്തി മെച്ചപ്പെടുത്തുന്നതായി കാണിച്ചിരിക്കുന്നു. ഗതാഗത സാഹചര്യങ്ങളെ വ്യാഖ്യാനിക്കുന്ന രീതി ക്രമേണ പരിഷ്കരിക്കുന്നു.
ഓപ്പൺ മോഡൽ, ഘടനാപരമായ യുക്തി, നൂതന പരിശീലനം എന്നിവയുടെ ഈ സംയോജനം അൽപമയോ-ആർ1 നെ ഒരു യൂറോപ്യൻ ശാസ്ത്ര സമൂഹത്തിന് ആകർഷകമായ വേദി., സ്വയംഭരണ സംവിധാനങ്ങളുടെ സ്വഭാവം പഠിക്കുന്നതിലും പുതിയ സുരക്ഷാ മാനദണ്ഡങ്ങളും നിയന്ത്രണ ചട്ടക്കൂടുകളും പര്യവേക്ഷണം ചെയ്യുന്നതിലും താൽപ്പര്യമുണ്ട്.
പ്രായോഗികമായി, ആക്സസ് ചെയ്യാവുന്ന ഒരു മോഡൽ വ്യത്യസ്ത രാജ്യങ്ങളിൽ നിന്നുള്ള ടീമുകൾക്ക് എളുപ്പത്തിൽ കൈകാര്യം ചെയ്യാൻ സഹായിക്കുന്നു. ഫലങ്ങൾ പങ്കിടുക, സമീപനങ്ങൾ താരതമ്യം ചെയ്യുക, നവീകരണം ത്വരിതപ്പെടുത്തുക സ്വയംഭരണ ഡ്രൈവിംഗിൽ, മുഴുവൻ യൂറോപ്യൻ വിപണിക്കും കൂടുതൽ ശക്തമായ മാനദണ്ഡങ്ങളിലേക്ക് വിവർത്തനം ചെയ്യാൻ കഴിയുന്ന ഒന്ന്.
GitHub, Hugging Face, ഓപ്പൺ ഡാറ്റ എന്നിവയിൽ ലഭ്യത
ഗിറ്റ്ഹബ്, ഹഗ്ഗിംഗ് ഫേസ് എന്നിവയിലൂടെ ആൽപമയോ-ആർ1 പൊതുജനങ്ങൾക്ക് ലഭ്യമാകുമെന്ന് എൻവിഡിയ സ്ഥിരീകരിച്ചു.കൃത്രിമബുദ്ധി മോഡലുകൾ വികസിപ്പിക്കുന്നതിനും വിതരണം ചെയ്യുന്നതിനുമുള്ള രണ്ട് മുൻനിര പ്ലാറ്റ്ഫോമുകളാണ് ഇവ. സങ്കീർണ്ണമായ വാണിജ്യ കരാറുകളുടെ ആവശ്യമില്ലാതെ തന്നെ ആർ & ഡി ടീമുകൾക്കും, സ്റ്റാർട്ടപ്പുകൾക്കും, പൊതു ലബോറട്ടറികൾക്കും ഈ മോഡൽ ആക്സസ് ചെയ്യാൻ ഈ നീക്കം അനുവദിക്കുന്നു.
മോഡലിനൊപ്പം, കമ്പനി പരിശീലനത്തിനായി ഉപയോഗിക്കുന്ന ഡാറ്റാസെറ്റുകളുടെ ഒരു ഭാഗം പ്രസിദ്ധീകരിക്കും NVIDIA ഫിസിക്കൽ AI ഓപ്പൺ ഡാറ്റാസെറ്റുകൾആന്തരികമായി നടത്തുന്ന പരീക്ഷണങ്ങൾ ആവർത്തിക്കുന്നതിനും വിപുലീകരിക്കുന്നതിനും പ്രത്യേകിച്ചും ഉപയോഗപ്രദമാകുന്ന ഭൗതികവും ഡ്രൈവിംഗ് സാഹചര്യങ്ങളുമാണ് ശേഖരങ്ങളിൽ കേന്ദ്രീകരിച്ചിരിക്കുന്നത്.
ഈ തുറന്ന സമീപനം യൂറോപ്യൻ സ്ഥാപനങ്ങളെ സഹായിക്കും, ഉദാഹരണത്തിന് മൊബിലിറ്റിയിലെ ഗവേഷണ കേന്ദ്രങ്ങൾ അല്ലെങ്കിൽ EU ധനസഹായത്തോടെയുള്ള പദ്ധതികൾനിങ്ങളുടെ പരീക്ഷണങ്ങളിൽ AR1 സംയോജിപ്പിച്ച് അതിന്റെ പ്രകടനം മറ്റ് സിസ്റ്റങ്ങളുമായി താരതമ്യം ചെയ്യുക. സ്പെയിൻ ഉൾപ്പെടെയുള്ള വിവിധ രാജ്യങ്ങളുടെ ട്രാഫിക് സ്വഭാവസവിശേഷതകളുമായി മൂല്യനിർണ്ണയ സാഹചര്യങ്ങൾ ക്രമീകരിക്കുന്നതും ഇത് എളുപ്പമാക്കും.
വ്യാപകമായി അറിയപ്പെടുന്ന റിപ്പോസിറ്ററികളിൽ പ്രസിദ്ധീകരിക്കുന്നത് ഡെവലപ്പർമാർക്കും ശാസ്ത്രജ്ഞർക്കും എളുപ്പമാക്കുന്നു മോഡലിന്റെ പെരുമാറ്റം ഓഡിറ്റ് ചെയ്യുക, പൊതുജന വിശ്വാസം അടിസ്ഥാനപരമായ ഒരു മേഖലയിൽ സുതാര്യത ശക്തിപ്പെടുത്തുന്നതിനായി മെച്ചപ്പെടുത്തലുകൾ നിർദ്ദേശിക്കുന്നതിനും അധിക ഉപകരണങ്ങൾ പങ്കിടുന്നതിനും.
യൂറോപ്യൻ ഓട്ടോമോട്ടീവ് വ്യവസായത്തിന്, ഒരു ആക്സസ് ചെയ്യാവുന്ന ബെഞ്ച്മാർക്ക് മോഡൽ ഉണ്ടായിരിക്കുന്നത് ഒരു അവസരത്തെ പ്രതിനിധീകരിക്കുന്നു വിലയിരുത്തൽ മാനദണ്ഡങ്ങൾ ഏകീകരിക്കുക പുതിയ ഓട്ടോണമസ് ഡ്രൈവിംഗ് സോഫ്റ്റ്വെയർ ഘടകങ്ങൾ പൊതുവായ അടിസ്ഥാനത്തിൽ പരീക്ഷിക്കുക, ഡ്യൂപ്ലിക്കേഷൻ കുറയ്ക്കുകയും പ്രോട്ടോടൈപ്പുകളിൽ നിന്ന് യഥാർത്ഥ പരിതസ്ഥിതിയിലേക്കുള്ള മാറ്റം ത്വരിതപ്പെടുത്തുകയും ചെയ്യുക.
ആൽപാസിം: ഒന്നിലധികം സാഹചര്യങ്ങളിൽ AR1 പ്രകടനം വിലയിരുത്തൽ.
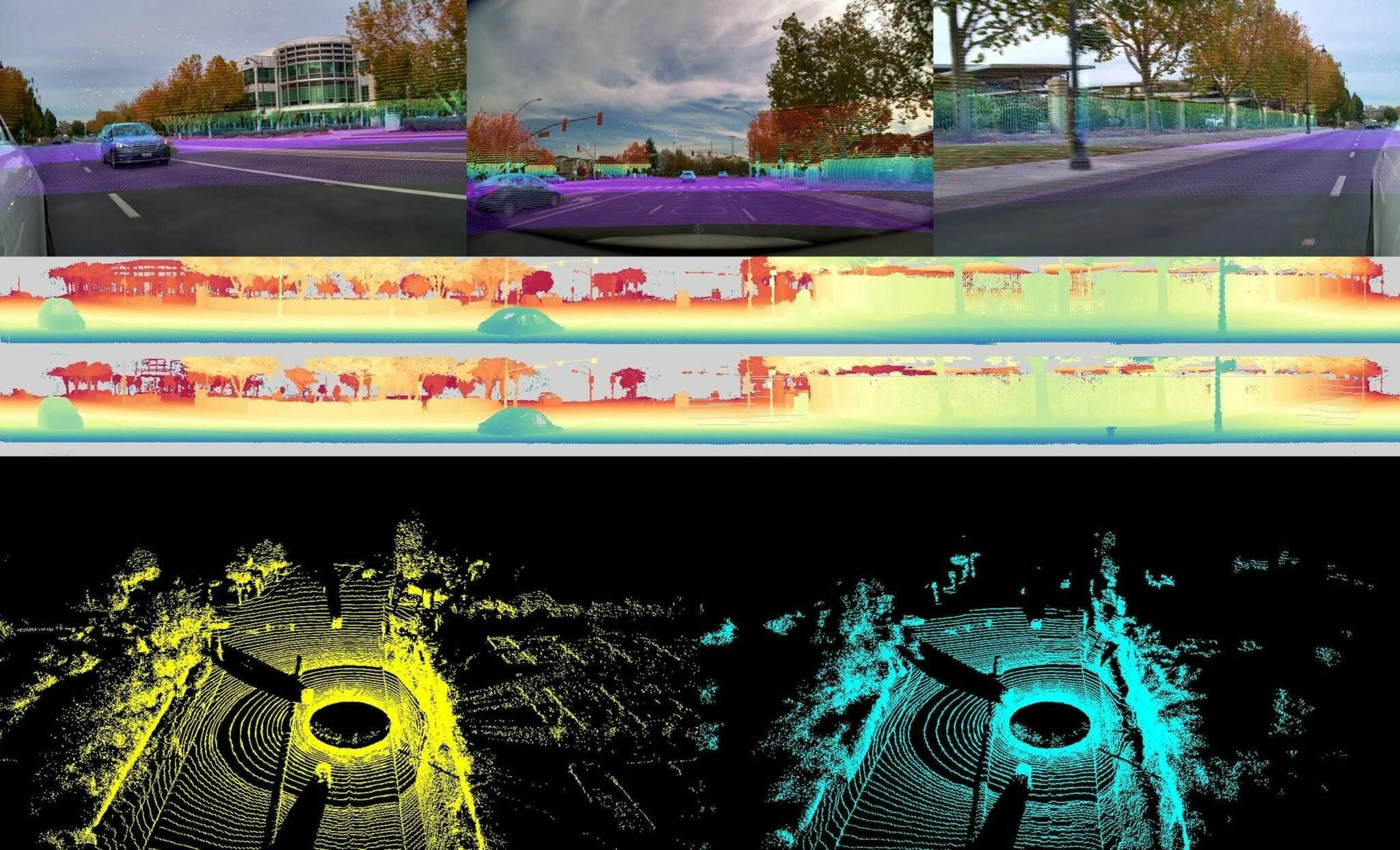
അൽപമയോ-ആർ1 നൊപ്പം, എൻവിഡിയ അവതരിപ്പിച്ചു അൽപസിംയു.എൻ വൈവിധ്യമാർന്ന സന്ദർഭങ്ങളിൽ മോഡൽ പരീക്ഷിക്കുന്നതിനായി സൃഷ്ടിച്ച ഓപ്പൺ സോഴ്സ് ഫ്രെയിംവർക്ക്ഒന്ന് ഉണ്ടായിരിക്കുക എന്നതാണ് ആശയം സ്റ്റാൻഡേർഡ് അസസ്മെന്റ് ടൂൾ വ്യത്യസ്ത ഗതാഗതം, കാലാവസ്ഥ, നഗര രൂപകൽപ്പന സാഹചര്യങ്ങൾ എന്നിവയിൽ AR1 ന്റെ സ്വഭാവം താരതമ്യം ചെയ്യാൻ ഇത് അനുവദിക്കുന്നു.
അൽപസിമിനൊപ്പം, ഗവേഷകർക്ക് സൃഷ്ടിക്കാൻ കഴിയും സിന്തറ്റിക്, റിയലിസ്റ്റിക് സാഹചര്യങ്ങൾ മൾട്ടി-ലെയ്ൻ ഹൈവേകൾ മുതൽ യൂറോപ്യൻ നഗരങ്ങളിലെ സാധാരണ റൗണ്ട് എബൗട്ടുകൾ വരെ, ഗതാഗതം ശാന്തമാക്കുന്ന റെസിഡൻഷ്യൽ ഏരിയകൾ അല്ലെങ്കിൽ കാൽനടയാത്രക്കാർ കൂടുതലുള്ള സ്കൂൾ സോണുകൾ ഉൾപ്പെടെ എല്ലാം അവ ആവർത്തിക്കുന്നു.
ചട്ടക്കൂട് രണ്ട് ക്വാണ്ടിറ്റേറ്റീവ് മെട്രിക്കുകളും അളക്കുന്നതിനായാണ് ഇത് രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത് (പ്രതികരണ സമയം, സുരക്ഷാ ദൂരം, നിയന്ത്രണങ്ങൾ പാലിക്കൽ) ഗുണപരമായി, ഇതുമായി ബന്ധപ്പെട്ടത് അൽപമയോ-ആർ1 ന്റെ ഘട്ടം ഘട്ടമായുള്ള ന്യായവാദം ഒരു പ്രത്യേക റൂട്ട് അല്ലെങ്കിൽ കുസൃതി എന്തിനാണ് തിരഞ്ഞെടുത്തതെന്ന് ന്യായീകരിക്കാനുള്ള അവരുടെ കഴിവും.
ഈ സമീപനം യൂറോപ്യൻ ടീമുകൾക്ക് അവരുടെ പരീക്ഷണങ്ങൾ കൂടുതൽ എളുപ്പമാക്കുന്നു EU നിയന്ത്രണ ആവശ്യകതകൾഓപ്പൺ റോഡ് ടെസ്റ്റുകൾക്ക് അംഗീകാരം നൽകുന്നതിന് മുമ്പ് നിയന്ത്രിത പരിതസ്ഥിതികളിലെ സ്വയംഭരണ സംവിധാനങ്ങളുടെ പെരുമാറ്റത്തെക്കുറിച്ചുള്ള വിശദമായ തെളിവുകൾ സാധാരണയായി ആവശ്യമായി വരും.
ആത്യന്തികമായി, ആൽപാസിം AR1 ന്റെ സ്വാഭാവിക പൂരകമായി മാറുന്നു, കാരണം അത് അനുയോജ്യമായ അന്തരീക്ഷം പ്രദാനം ചെയ്യുന്നു ആവർത്തിക്കുക, ക്രമീകരിക്കുക, സാധൂകരിക്കുക യഥാർത്ഥ ഉപയോക്താക്കളെ ഇതുവരെ വേണ്ടത്ര പരീക്ഷിക്കപ്പെടാത്ത സാഹചര്യങ്ങളിലേക്ക് തുറന്നുകാട്ടാതെ തന്നെ മോഡലിന്റെ മെച്ചപ്പെടുത്തലുകൾ.
ന്റെ സംയോജനം ഓപ്പൺ VLA മോഡൽ, ഫിസിക്കൽ ഡാറ്റാസെറ്റുകൾ, സിമുലേഷൻ ഫ്രെയിംവർക്ക് ഭാവിയിലെ ഓട്ടോണമസ് വാഹനങ്ങൾ യൂറോപ്പിലും, വിപുലീകരണത്തിലൂടെ, ലോകത്തിന്റെ മറ്റു ഭാഗങ്ങളിലും എങ്ങനെ പരീക്ഷിച്ച് സാക്ഷ്യപ്പെടുത്തണം എന്നതിനെക്കുറിച്ചുള്ള ചർച്ചയിൽ ഇത് NVIDIAയെ പ്രസക്തമായ ഒരു സ്ഥാനത്ത് എത്തിക്കുന്നു.
ഈ ഘടകങ്ങളെല്ലാം ഉപയോഗിച്ച്, അൽപമയോ-ആർ1 ശാസ്ത്ര സമൂഹത്തിനും വ്യവസായത്തിനും ഓട്ടോമേറ്റഡ് രീതിയിൽ ഡ്രൈവിംഗിന്റെ പുതിയ വഴികൾ പര്യവേക്ഷണം ചെയ്യുന്നതിനുള്ള ഒരു പ്രധാന വേദിയായി ഉയർന്നുവരുന്നു, ഇത് സംഭാവന ചെയ്യുന്നു കൂടുതൽ സുതാര്യത, വിശകലന ശേഷി, സുരക്ഷ ഇപ്പോഴും നിയന്ത്രണപരവും സാങ്കേതികവുമായ വികസനത്തിന് കീഴിലുള്ള ഒരു മേഖലയിലേക്ക്.

അവൻ്റെ "ഗീക്ക്" താൽപ്പര്യങ്ങൾ ഒരു തൊഴിലാക്കി മാറ്റിയ ഒരു സാങ്കേതിക തത്പരനാണ് ഞാൻ. എൻ്റെ ജീവിതത്തിൻ്റെ 10 വർഷത്തിലേറെ ഞാൻ അത്യാധുനിക സാങ്കേതികവിദ്യ ഉപയോഗിച്ചും ശുദ്ധമായ ജിജ്ഞാസയിൽ നിന്ന് എല്ലാത്തരം പ്രോഗ്രാമുകളും ഉപയോഗിച്ച് ചെലവഴിച്ചു. ഇപ്പോൾ ഞാൻ കമ്പ്യൂട്ടർ സാങ്കേതികവിദ്യയിലും വീഡിയോ ഗെയിമുകളിലും സ്പെഷ്യലൈസ് ചെയ്തിട്ടുണ്ട്. കാരണം, 5 വർഷത്തിലേറെയായി ഞാൻ സാങ്കേതികവിദ്യയിലും വീഡിയോ ഗെയിമുകളിലും വിവിധ വെബ്സൈറ്റുകൾക്കായി എഴുതുന്നു, എല്ലാവർക്കും മനസ്സിലാകുന്ന ഭാഷയിൽ നിങ്ങൾക്കാവശ്യമായ വിവരങ്ങൾ നൽകാൻ ശ്രമിക്കുന്ന ലേഖനങ്ങൾ സൃഷ്ടിക്കുന്നു.
നിങ്ങൾക്ക് എന്തെങ്കിലും ചോദ്യങ്ങളുണ്ടെങ്കിൽ, എൻ്റെ അറിവ് വിൻഡോസ് ഓപ്പറേറ്റിംഗ് സിസ്റ്റവുമായി ബന്ധപ്പെട്ട എല്ലാത്തിലും മൊബൈൽ ഫോണുകൾക്കായുള്ള ആൻഡ്രോയിഡുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു. എൻ്റെ പ്രതിബദ്ധത നിങ്ങളോടാണ്, ഈ ഇൻ്റർനെറ്റ് ലോകത്ത് നിങ്ങൾക്കുണ്ടായേക്കാവുന്ന ഏത് ചോദ്യങ്ങളും പരിഹരിക്കാൻ കുറച്ച് മിനിറ്റ് ചെലവഴിക്കാനും നിങ്ങളെ സഹായിക്കാനും ഞാൻ എപ്പോഴും തയ്യാറാണ്.