- Alpamayo-R1 သည် ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရယာဉ်များဆီသို့ ဦးတည်သော ပထမဆုံး vision-language-action VLA မော်ဒယ်ဖြစ်သည်။
- ရှုပ်ထွေးသော အခြေအနေများကို ဖြေရှင်းရန် လမ်းကြောင်းစီစဉ်ခြင်းတွင် အဆင့်ဆင့် ကျိုးကြောင်းဆင်ခြင်ခြင်းကို ပေါင်းစပ်သည်။
- ၎င်းသည် NVIDIA Cosmos Reason ကို အခြေခံ၍ ဖွင့်ထားသော မော်ဒယ်ဖြစ်ပြီး GitHub နှင့် Hugging Face တွင် ရနိုင်ပါသည်။
- AlpaSim နှင့် Physical AI ၏ Open Datasets တို့သည် AR1 နှင့် validation နှင့် စမ်းသပ်မှုများကို အားကောင်းစေသည်။

အလိုအလျောက်မောင်းနှင်သော ဂေဟစနစ်သည် ရောက်ရှိလာခြင်းနှင့်အတူ ရှေ့သို့ ခြေတစ်လှမ်းကြာသည်။ Alpamayo-R1 (AR1) မောင်းနှင်ရန်ဉာဏ်ရည်တု မော်ဒယ်၊ မော်တော်ယာဥ်များသည် ပတ်ဝန်းကျင်ကို မြင်ရုံသာမက ၎င်းကို နားလည်ပြီး လိုက်လျောညီထွေ ပြုမူနိုင်ရန် ဒီဇိုင်းထုတ်ထားသည့် အတုဖြစ်သည်။ NVIDIA မှ တီထွင်မှုအသစ် အထူးသဖြင့် စျေးကွက်များကဲ့သို့သော ကဏ္ဍများအတွက် စံသတ်မှတ်ချက်တစ်ခုအဖြစ် ရပ်တည်ထားသည်။ ဥရောပနှင့် စပိန်စည်းကမ်းများနှင့် လမ်းအန္တရာယ်ကင်းရှင်းရေး အထူးတင်းကြပ်သည့်နေရာ။
NVIDIA မှ ဖွံ့ဖြိုးတိုးတက်မှုအသစ်ကို တင်ဆက်ပေးလိုက်ပါတယ်။ ပထမ VLA မော်ဒယ် (အမြင်-ဘာသာစကား-လုပ်ဆောင်ချက်) ပွင့်လင်းသော ကျိုးကြောင်းဆင်ခြင်ခြင်းအပေါ် အထူးအလေးပေးသည်။ ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရယာဉ်များဆိုင်ရာ သုတေသနအာရုံခံကိရိယာဒေတာကို ရိုးရှင်းစွာလုပ်ဆောင်ခြင်းအစား Alpamayo-R1 သည် ဆုံးဖြတ်ချက်ချရာတွင် ပွင့်လင်းမြင်သာမှုနှင့် လုံခြုံရေးကို မျက်ခြေမပြတ်စေဘဲ ပိုမိုမြင့်မားသော ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရအဆင့်သို့ ရွေ့လျားရန် အဓိကသော့ချက်ဖြစ်သည့် ဖွဲ့စည်းတည်ဆောက်ထားသော ကျိုးကြောင်းဆင်ခြင်နိုင်စွမ်းကို ပေါင်းစပ်ထားသည်။
Alpamayo-R1 ဆိုတာ ဘာလဲ၊ ဘာကြောင့် အချိုးအကွေ့ အမှတ်အသား ဖြစ်တာလဲ။

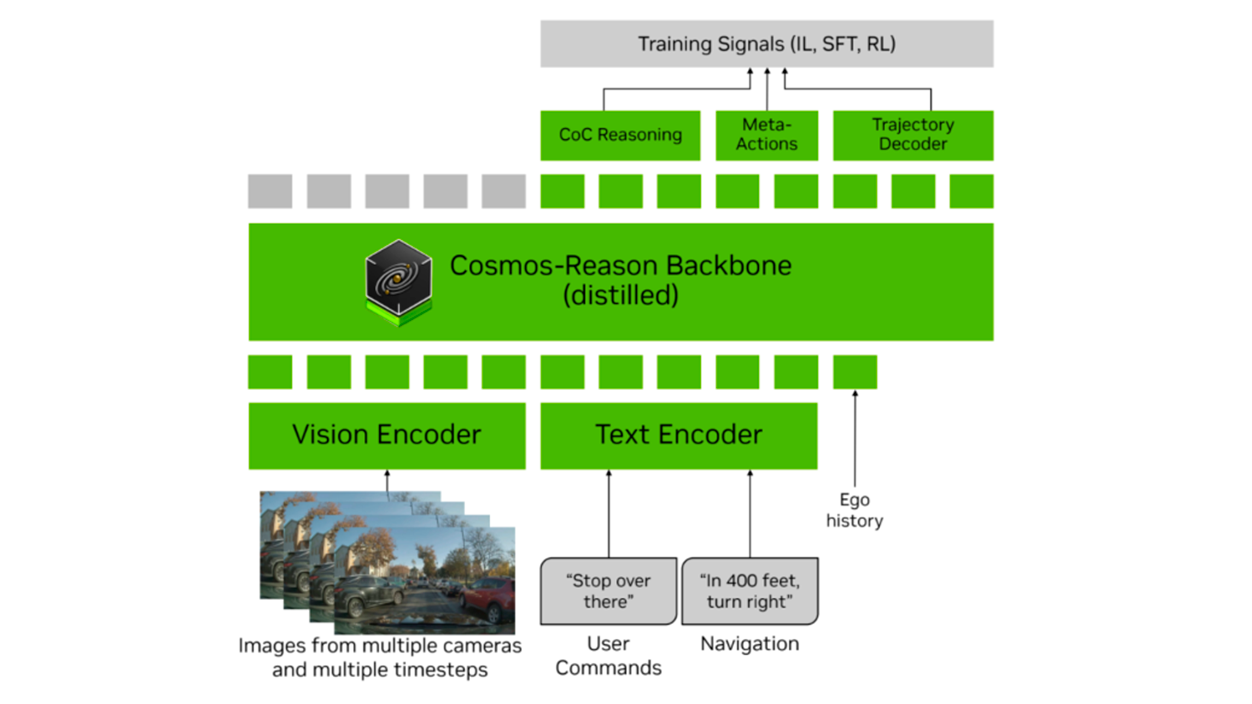
Alpamayo-R1 သည် ပေါင်းစပ်ထားသော AI မော်ဒယ်လ်အသစ်၏ အစိတ်အပိုင်းတစ်ခုဖြစ်သည်။ ကွန်ပြူတာအမြင်၊ သဘာဝဘာသာစကားဖြင့် လုပ်ဆောင်ခြင်းနှင့် ခိုင်မာသော လုပ်ဆောင်ချက်များဤ VLA ချဉ်းကပ်နည်းသည် စနစ်အား အမြင်ဆိုင်ရာ အချက်အလက် (ကင်မရာများ၊ အာရုံခံကိရိယာများ) ကို လက်ခံရရှိစေကာ ၎င်းအား ဘာသာစကားဖြင့် ဖော်ပြကာ ရှင်းပြကာ တူညီသော ကျိုးကြောင်းဆင်ခြင်မှု စီးဆင်းမှုအတွင်း အားလုံးကို မှန်ကန်သော မောင်းနှင်မှုဆိုင်ရာ ဆုံးဖြတ်ချက်များနှင့် ချိတ်ဆက်နိုင်စေပါသည်။
အခြားသော အလိုအလျောက်မောင်းနှင်မှုပုံစံများသည် လေ့လာပြီးသားပုံစံများကို တုံ့ပြန်ရန်အတွက် ကန့်သတ်ထားသော်လည်း AR1 သည် ၎င်းကို အာရုံစိုက်သည်။ တစ်ဆင့်ပြီးတစ်ဆင့် ဆင်ခြင်ခြင်း သို့မဟုတ် စဉ်ဆက်မပြတ်တွေးခေါ်ခြင်း။၎င်းကို လမ်းကြောင်းစီစဉ်ခြင်းတွင် တိုက်ရိုက်ပေါင်းစပ်ခြင်း။ ဆိုလိုသည်မှာ ယာဉ်သည် ရှုပ်ထွေးသောအခြေအနေတစ်ခုကို စိတ်ပိုင်းဆိုင်ရာအရ ချိုးဖျက်နိုင်ပြီး ရွေးချယ်စရာများကို အကဲဖြတ်နိုင်ပြီး ၎င်းသည် တိကျသည့်လေ့ကျင့်မှုကို ရွေးချယ်ရသည့် အကြောင်းရင်းကို အတွင်းပိုင်း၌ မျှတစေပြီး စုံစမ်းစစ်ဆေးသူများနှင့် စည်းကမ်းထိန်းသိမ်းရေးမှူးများအတွက် အကဲဖြတ်ရန် ပိုမိုလွယ်ကူစေသည်။
Alpamayo-R1 နှင့် NVIDIA ၏အလောင်းအစားသည် ထိန်းချုပ်မှုဆိုင်ရာ အယ်လဂိုရီသမ်များကို ပိုမိုကောင်းမွန်စေသည်- ရည်ရွယ်ချက်မှာ မောင်းနှင်ရန်ဖြစ်သည်။ AI သည် ၎င်း၏အပြုအမူကို ရှင်းပြနိုင်စွမ်းရှိသည်။အလိုအလျောက် ဆုံးဖြတ်ချက်များကို ခြေရာခံနိုင်မှုနှင့် သယ်ယူပို့ဆောင်ရေးနယ်ပယ်တွင် နည်းပညာဆိုင်ရာ တာဝန်များကို ပိုမိုတန်ဖိုးထားလာနိုင်သည့် ဥရောပသမဂ္ဂကဲ့သို့သော နယ်မြေများတွင် အထူးသဖြင့် ၎င်းသည် သက်ဆိုင်ပါသည်။
ထို့ကြောင့် AR1 သည် အဆင့်မြင့် ခံယူချက် မော်ဒယ်တစ်ခုမျှသာမကဘဲ စိန်ခေါ်မှုကြီးကို ဖြေရှင်းရန် ဒီဇိုင်းထုတ်ထားသည့် ကိရိယာတစ်ခုဖြစ်သည်။ ဘေးကင်းပြီး လူသားဆန်ဆန် ကိုယ်ပိုင်အုပ်ချုပ်ခွင့် မောင်းနှင်ခြင်း။၎င်းသည် ဥရောပလမ်းများပေါ်တွင် ၎င်း၏ အမှန်တကယ်မွေးစားမှုအတွက် အရေးကြီးသော ရှုထောင့်တစ်ခုဖြစ်သည်။
လက်တွေ့ဘဝအခြေအနေများနှင့် ရှုပ်ထွေးသောပတ်ဝန်းကျင်များတွင် ကျိုးကြောင်းဆင်ခြင်ခြင်း။
Alpamayo-R1 ၏အားသာချက်များထဲမှတစ်ခုမှာ၎င်း၏အားသာချက်ဖြစ်သည်။ ကိုင်တွယ်နိုင်စွမ်း မြို့ပြဆက်တင်များတွင် ကွဲပြားမှုများနှင့် ပြည့်နေသည်။အရင်မော်ဒယ်တွေက ပြဿနာပိုများတယ်။ မဝံ့မရဲ လူကူးမျဉ်းကြားအနီးသို့ လမ်းသွားလမ်းလာများနှင့် လမ်းဖြတ်ကူးမှုများ၊ လမ်း၏တစ်စိတ်တစ်ပိုင်းကို သိမ်းပိုက်ထားသော ဆိုးဆိုးရွားရွား ရပ်ထားသည့် ယာဉ်များ သို့မဟုတ် ရုတ်တရက် လမ်းပိတ်ခြင်းသည် ရိုးရှင်းသော အရာဝတ္တုကို ထောက်လှမ်းခြင်း မလုံလောက်သည့် အခြေအနေများ၏ ဥပမာများဖြစ်သည်။
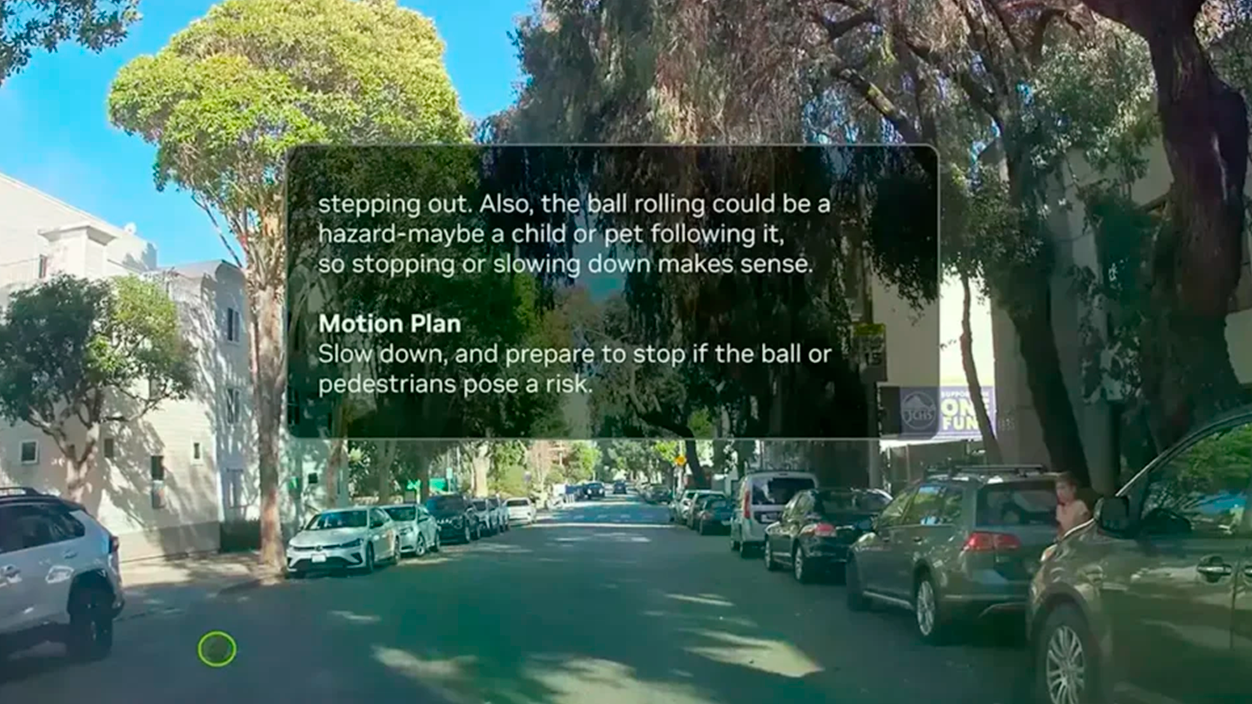
ဒီလိုပတ်ဝန်းကျင်မျိုးမှာ၊ AR1 သည် အခင်းအကျင်းကို ပိုင်းခြားထားသည်။ ကျိုးကြောင်းဆင်ခြင်ခြင်း၏သေးငယ်သောခြေလှမ်းများလမ်းသွားလမ်းလာ လှုပ်ရှားမှု၊ အခြားယာဉ်များ၏ အနေအထား၊ ဆိုင်းဘုတ်များနှင့် စက်ဘီးလမ်းကြောများ သို့မဟုတ် တင်ဆောင်ခြင်းနှင့် လွှင့်တင်ခြင်းဇုန်များကဲ့သို့သော အစိတ်အပိုင်းများကို ထည့်သွင်းစဉ်းစားခြင်း။ အဲဒီကနေ၊ ၎င်းသည် မတူညီသော ဖြစ်နိုင်သည့်လမ်းကြောင်းများကို အကဲဖြတ်ကာ အလုံခြုံဆုံးနှင့် အသင့်လျော်ဆုံးဟု ယူဆသည့်လမ်းကြောင်းကို ရွေးချယ်သည်။ အချိန်နှင့်တပြေးညီ။
ဥပမာအားဖြင့်၊ ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရကားတစ်စီး မောင်းနှင်နေပါက၊ ဥပမာ၊ စက်ဘီးလမ်းသွယ်တစ်ခုရှိ ကျဉ်းမြောင်းသော ဥရောပလမ်းတစ်လျှောက်နှင့် လမ်းသွားလမ်းလာများစွာ၊ Alpamayo-R1 သည် လမ်းကြောင်းတစ်ခုစီ၏ အပိုင်းတစ်ခုစီကို ပိုင်းခြားစိတ်ဖြာနိုင်ပြီး ၎င်းတွင် လေ့လာတွေ့ရှိထားသည်များကို ရှင်းပြနိုင်ပြီး အချက်တစ်ခုစီသည် ၎င်း၏ဆုံးဖြတ်ချက်အပေါ် မည်သို့လွှမ်းမိုးထားသည်။ အမြန်နှုန်းကို လျှော့ချရန်၊ ဘေးတိုက်အကွာအဝေးကို တိုးမြှင့်ရန် သို့မဟုတ် လမ်းကြောင်းကို အနည်းငယ် ပြင်ဆင်ပါ။
ဤအသေးစိတ်အဆင့်သည် သုတေသနနှင့် ဖွံ့ဖြိုးရေးအဖွဲ့များကို ပြန်လည်သုံးသပ်ရန် ခွင့်ပြုသည်။ မော်ဒယ်၏အတွင်းပိုင်းအကြောင်းပြချက်၎င်းသည် ဖြစ်နိုင်ချေရှိသော အမှားအယွင်းများ သို့မဟုတ် ဘက်လိုက်မှုများကို ဖော်ထုတ်ရန်နှင့် လေ့ကျင့်ရေးဒေတာနှင့် ထိန်းချုပ်မှုစည်းမျဉ်းများ နှစ်ခုလုံးကို ချိန်ညှိနိုင်စေပါသည်။ ၎င်းတို့၏ သမိုင်းဝင်စင်တာများ၊ ပုံမှန်မဟုတ်သော လမ်းအပြင်အဆင်များနှင့် အလွန်ပြောင်းလဲနိုင်သော ယာဉ်ကြောအသွားအလာများရှိသည့် ဥရောပမြို့များအတွက်၊ ဤပြောင်းလွယ်ပြင်လွယ်သည် အထူးတန်ဖိုးရှိပါသည်။
ထို့အပြင်၊ ၎င်းတို့၏ရွေးချယ်မှုများကို မျှတအောင်ပြုလုပ်နိုင်မှုသည် အနာဂတ်စည်းမျဉ်းများနှင့် ပိုမိုကောင်းမွန်စွာပေါင်းစည်းရန် တံခါးဖွင့်ပေးပါသည်။ ဥရောပတွင် ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရယာဉ်များစနစ်သည် ကျိုးကြောင်းဆီလျော်သော လုပ်ငန်းစဉ်ကို လိုက်နာပြီး ကောင်းမွန်သော လမ်းဘေးကင်းရေး အလေ့အကျင့်များနှင့် လိုက်လျောညီထွေဖြစ်ကြောင်း သရုပ်ပြရန် ပိုမိုလွယ်ကူစေသောကြောင့် ဖြစ်သည်။
NVIDIA Cosmos Reason ကိုအခြေခံ၍ မော်ဒယ်ကိုဖွင့်ပါ။
Alpamayo-R1 ၏ နောက်ထပ်ထူးခြားချက်မှာ ၎င်း၏စရိုက်လက္ခဏာဖြစ်သည်။ ပွင့်လင်းသော သုတေသနကို ဦးတည်သော ပုံစံNVIDIA ၏အခြေခံပေါ်တွင်၎င်းကိုတည်ဆောက်ခဲ့သည်။ NVIDIA Cosmos အကြောင်းပြချက်မတူညီသော သတင်းရင်းမြစ်များကို ပေါင်းစပ်ပြီး ရှုပ်ထွေးသော ဆုံးဖြတ်ချက်လုပ်ငန်းစဉ်များကို ဖွဲ့စည်းတည်ဆောက်ရန် ခွင့်ပြုသည့် AI ဆင်ခြင်ခြင်းအပေါ် အာရုံစိုက်သည့် ပလပ်ဖောင်းတစ်ခုဖြစ်သည်။
ဒီနည်းပညာအခြေခံကြောင့် သုတေသီတွေ လုပ်နိုင်ခဲ့တယ်။ AR1 ကို စမ်းသပ်မှုများစွာနှင့် စမ်းသပ်မှုများသို့ လိုက်လျောညီထွေဖြစ်အောင် တိုက်ရိုက်စီးပွားဖြစ်ရည်ရွယ်ချက်မရှိသော၊ ပညာရပ်ဆိုင်ရာ စမ်းသပ်မှုများမှသည် တက္ကသိုလ်များ၊ နည်းပညာစင်တာများ သို့မဟုတ် ကားထုတ်လုပ်သူများနှင့် ပူးပေါင်းကာ စမ်းသပ်ပရောဂျက်များအထိဖြစ်သည်။
မော်ဒယ်ကနေအထူးသဖြင့်အကျိုးကျေးဇူးများ အားဖြည့်သင်ယူမှုဤနည်းပညာသည် ၎င်း၏ ဆုံးဖြတ်ချက်များ၏ အရည်အသွေးအပေါ် အခြေခံ၍ ဆုလာဘ်များ သို့မဟုတ် ပြစ်ဒဏ်များရယူခြင်းမှတစ်ဆင့် ၎င်း၏စွမ်းဆောင်ရည်ကို မြှင့်တင်ပေးသည့်စနစ်တွင် ပါဝင်ပါသည်။ ဤချဉ်းကပ်မှုသည် AR1 ၏ ကျိုးကြောင်းဆင်ခြင်မှုကို မြှင့်တင်ရန် ပြသထားသည်။ ယာဉ်အသွားအလာအခြေအနေများကို ဘာသာပြန်ဆိုခြင်းနည်းလမ်းကို အဆင့်ဆင့် ပြုပြင်သည်။.
ဤပွင့်လင်းသော မော်ဒယ်လ်ပေါင်းစပ်မှု၊ ဖွဲ့စည်းတည်ဆောက်ထားသော ကျိုးကြောင်းဆင်ခြင်မှုနှင့် အဆင့်မြင့်လေ့ကျင့်ရေးရာထူးများအဖြစ် Alpamayo-R1 ဥရောပသိပ္ပံပညာအသိုင်းအဝိုင်းအတွက် ဆွဲဆောင်မှုရှိသော ပလပ်ဖောင်းကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရစနစ်များ၏ အမူအကျင့်များကို လေ့လာခြင်းနှင့် ဘေးကင်းရေး စံနှုန်းများနှင့် စည်းမျဉ်းဘောင်အသစ်များကို ရှာဖွေခြင်းတွင် နှစ်ဦးစလုံး စိတ်ပါဝင်စားသူ။
လက်တွေ့တွင်၊ လက်လှမ်းမီနိုင်သော မော်ဒယ်တစ်ခုရှိခြင်းသည် နိုင်ငံအသီးသီးမှ အသင်းများအတွက် ပိုမိုလွယ်ကူစေသည်။ ရလဒ်များကို မျှဝေပါ၊ ချဉ်းကပ်မှုများကို နှိုင်းယှဉ်ကာ ဆန်းသစ်တီထွင်မှုကို အရှိန်မြှင့်ပါ။ အလိုအလျောက်မောင်းနှင်မှုတွင်၊ ဥရောပစျေးကွက်တစ်ခုလုံးအတွက် ပိုမိုခိုင်မာသောစံနှုန်းများအဖြစ် ဘာသာပြန်ဆိုနိုင်သည့်အရာ။
GitHub၊ Hugging Face နှင့် open data တို့တွင် ရရှိနိုင်သည်။
NVIDIA သည် Alpamayo-R1 ကို GitHub နှင့် Hugging Face မှတဆင့် လူသိရှင်ကြား ရနိုင်မည်ဖြစ်ကြောင်း အတည်ပြုခဲ့သည်။၎င်းတို့သည် ဉာဏ်ရည်တုမော်ဒယ်များကို တီထွင်ဖန်တီးခြင်းနှင့် ဖြန့်ဖြူးခြင်းအတွက် ထိပ်တန်းပလက်ဖောင်းနှစ်ခုဖြစ်သည်။ ဤရွေ့လျားမှုသည် R&D အဖွဲ့များ၊ startup များနှင့် အများသူငှာ ဓာတ်ခွဲခန်းများကို ရှုပ်ထွေးသော ကူးသန်းရောင်းဝယ်ရေးသဘောတူညီချက်များမလိုအပ်ဘဲ မော်ဒယ်ကိုဝင်ရောက်ခွင့်ပေးသည်။
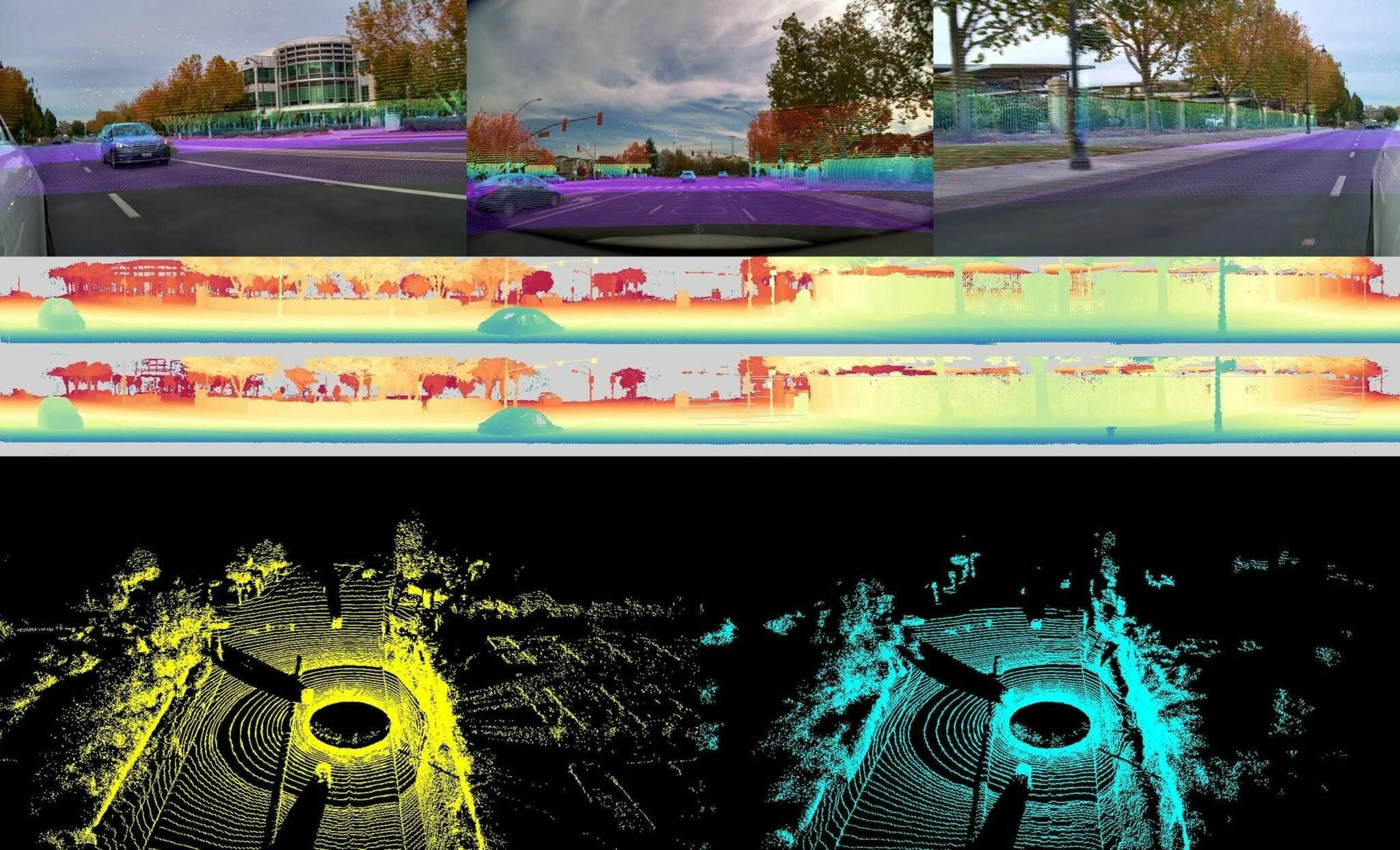
မော်ဒယ်နှင့်အတူ၊ ကုမ္ပဏီသည် ၎င်း၏လေ့ကျင့်ရေးတွင် အသုံးပြုသည့် ဒေတာအတွဲတစ်ပိုင်းကို ထုတ်ဝေမည်ဖြစ်သည်။ NVIDIA Physical AI ဒေတာအတွဲများကို ဖွင့်ပါ။စုစည်းမှုများသည် အတွင်းပိုင်း၌ ပြုလုပ်ခဲ့သည့် စမ်းသပ်မှုများကို ပုံတူပွားခြင်းနှင့် တိုးချဲ့ခြင်းအတွက် အထူးအသုံးဝင်သော ရုပ်ပိုင်းဆိုင်ရာနှင့် မောင်းနှင်မှုဆိုင်ရာ မြင်ကွင်းများကို အာရုံစိုက်ထားပါသည်။
ဤပွင့်လင်းသောချဉ်းကပ်မှုကဲ့သို့သော ဥရောပအဖွဲ့အစည်းများကို ကူညီပေးနိုင်သည်။ ရွေ့လျားနိုင်မှု သို့မဟုတ် အီးယူမှ ရန်ပုံငွေပရောဂျက်များတွင် သုတေသနစင်တာများသင့်စမ်းသပ်မှုများတွင် AR1 ကို ပေါင်းစပ်ပြီး ၎င်း၏စွမ်းဆောင်ရည်ကို အခြားစနစ်များနှင့် နှိုင်းယှဉ်ပါ။ စပိန်အပါအဝင် မတူညီသောနိုင်ငံများ၏ အသွားအလာ လက္ခဏာများနှင့် အကဲဖြတ်ခြင်းဆိုင်ရာ အခြေအနေကို ချိန်ညှိရန်လည်း ပိုမိုလွယ်ကူစေမည်ဖြစ်သည်။
လူသိများသော repositories တွင် ထုတ်ဝေခြင်းသည် developer များနှင့် သိပ္ပံပညာရှင်များအတွက် ပိုမိုလွယ်ကူစေသည်။ မော်ဒယ်၏အပြုအမူကိုစစ်ဆေးပါ။တိုးတက်မှုများကို အဆိုပြုရန်နှင့် နောက်ထပ်ကိရိယာများကို မျှဝေရန်၊ အများသူငှာယုံကြည်မှုသည် အခြေခံကျသော နယ်ပယ်တွင် ပွင့်လင်းမြင်သာမှုကို အားဖြည့်ပေးသည်။
ဥရောပ မော်တော်ကားလုပ်ငန်းအတွက်၊ လက်လှမ်းမီနိုင်သော စံသတ်မှတ်ချက်တစ်ခုရှိခြင်းသည် အခွင့်အလမ်းတစ်ခုဖြစ်သည်။ အကဲဖြတ်မှု စံနှုန်းများကို ပေါင်းစည်းပါ။ တူညီသောအခြေခံဖြင့် အလိုအလျောက်မောင်းနှင်နိုင်သော ဆော့ဖ်ဝဲလ်အစိတ်အပိုင်းအသစ်များကို စမ်းသပ်ပြီး ထပ်တူထပ်ခြင်းကိုလျှော့ချကာ ရှေ့ပြေးပုံစံများမှ တကယ့်ပတ်ဝန်းကျင်သို့ ကူးပြောင်းမှုကို အရှိန်မြှင့်ပေးသည်။
AlpaSim- အခြေအနေများစွာတွင် AR1 စွမ်းဆောင်ရည်ကို အကဲဖြတ်ခြင်း။
Alpamayo-R1 နှင့်အတူ၊ NVIDIA က တင်ပြထားပါတယ်။ AlpaSim, တစ်ခု ကျယ်ပြန့်သောအခြေအနေများတွင်မော်ဒယ်ကိုစမ်းသပ်ရန်ဖန်တီးထားသော open-source frameworkတစ်ခုရှိဖို့ စိတ်ကူးရှိတယ်။ စံပြုအကဲဖြတ်ခြင်းကိရိယာ မတူညီသော ယာဉ်ကြောအသွားအလာ၊ ရာသီဥတုနှင့် မြို့ပြဒီဇိုင်းအခြေအနေများတွင် AR1 ၏အပြုအမူကို နှိုင်းယှဉ်ခွင့်ပြုသည်။
AlpaSim ဖြင့်၊ သုတေသီများ ဖန်တီးနိုင်သည်။ ပေါင်းစပ်ပြီး လက်တွေ့ဆန်သော အခြေအနေများ လမ်းသွားလမ်းသွားများစွာမှ အဝေးပြေးလမ်းများ အေးဆေးတည်ငြိမ်သော လူနေရပ်ကွက်များ သို့မဟုတ် လမ်းသွားလမ်းလာများသော ကျောင်းဇုန်များအပါအဝင် ဥရောပမြို့ကြီးများရှိ ပုံမှန်အဝိုင်းများအထိ အရာအားလုံးကို ပုံတူကူးထားသည်။
ဘောင် ၎င်းသည် ပမာဏတိုင်းတာမှုနှစ်ခုလုံးကို တိုင်းတာရန် ဒီဇိုင်းထုတ်ထားသည်။ (တုံ့ပြန်မှုအချိန်၊ ဘေးကင်းရေးအကွာအဝေး၊ စည်းမျဉ်းစည်းကမ်းများကိုလိုက်နာခြင်း) အရည်အသွေးအဖြစ်, ဆက်စပ် Alpamayo-R1 ၏ အဆင့်ဆင့် ဆင်ခြင်ခြင်း။ တိကျသောလမ်းကြောင်း သို့မဟုတ် လမ်းကြောင်းကို အဘယ်ကြောင့်ရွေးချယ်ခဲ့သည်ကို အကြောင်းပြု၍ ၎င်းတို့၏ အရည်အချင်းကို သက်သေပြနိုင်သည် ။
ဤနည်းလမ်းသည် ဥရောပအသင်းများ၏ စမ်းသပ်မှုများနှင့် ချိန်ညှိရန် ပိုမိုလွယ်ကူစေသည်။ အီးယူ စည်းမျဉ်းစည်းကမ်းသတ်မှတ်ချက်များလမ်းဖွင့်စစ်ဆေးမှုများကို ခွင့်ပြုခြင်းမပြုမီ ထိန်းချုပ်ထားသော ပတ်ဝန်းကျင်များတွင် ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရစနစ်များ၏ အပြုအမူဆိုင်ရာ အသေးစိတ်အထောက်အထားများ လိုအပ်ပါသည်။
အဆုံးစွန်အားဖြင့်၊ AlpaSim သည် AR1 အတွက် သဘာဝအတိုင်း ဖြည့်စွမ်းပေးသည်။စံပြပတ်ဝန်းကျင်ကို ကမ်းလှမ်းသကဲ့သို့၊ ထပ်ခါထပ်ခါ၊ ချိန်ညှိပြီး အတည်ပြုပါ။ လုံလုံလောက်လောက် မစမ်းသပ်ရသေးသော အခြေအနေများကို အမှန်တကယ် အသုံးပြုသူများကို ထုတ်ဖော်ပြသရန် မလိုအပ်ဘဲ မော်ဒယ်အား မြှင့်တင်မှုများ။
ပေါင်းစပ်မှု VLA မော်ဒယ်၊ ရုပ်ပိုင်းဆိုင်ရာ ဒေတာအတွဲများနှင့် သရုပ်ဖော်မူဘောင်ကို ဖွင့်ပါ။ ၎င်းသည် NVIDIA အား ဥရောပတွင် အနာဂတ်ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်ရယာဉ်များကို မည်သို့စမ်းသပ်ပြီး အသိအမှတ်ပြုရမည်ကို အချေအတင်ဆွေးနွေးမှုအတွင်း သက်ဆိုင်ရာအနေအထားတွင် နေရာပေးထားသည်။
ဤအရာများအားလုံးနှင့်အတူ၊ Alpamayo-R1 သည် သိပ္ပံပညာအသိုင်းအဝိုင်းနှင့်စက်မှုလုပ်ငန်းအတွက် အဓိကကျသောပလက်ဖောင်းတစ်ခုအဖြစ် ပေါ်ထွက်လာပြီး အလိုအလျောက်မောင်းနှင်မှုနည်းလမ်းအသစ်များကို ရှာဖွေဖော်ထုတ်ရန်၊ ပိုမိုပွင့်လင်းမြင်သာမှု၊ ခွဲခြမ်းစိတ်ဖြာနိုင်စွမ်းနှင့် လုံခြုံရေး စည်းမျဉ်းစည်းကမ်းနှင့် နည်းပညာဆိုင်ရာ ဖွံ့ဖြိုးတိုးတက်မှုအောက်တွင် ရှိနေဆဲဖြစ်သော နယ်ပယ်တစ်ခုဆီသို့။

ကျွန်တော်သည် သူ၏ "geek" စိတ်ဝင်စားမှုများကို အသက်မွေးဝမ်းကြောင်းတစ်ခုအဖြစ် ပြောင်းလဲပေးသော နည်းပညာကို ဝါသနာပါသူတစ်ဦးဖြစ်သည်။ ကျွန်ုပ်သည် စူးစမ်းလိုစိတ်ဖြင့် ပရိုဂရမ်အမျိုးမျိုးဖြင့် ခေတ်မီနည်းပညာများကို အသုံးပြုကာ ဘဝကို 10 နှစ်ကျော် ကုန်ဆုံးခဲ့သည်။ ယခု ကျွန်ုပ်သည် ကွန်ပျူတာနည်းပညာနှင့် ဗီဒီယိုဂိမ်းများကို အထူးပြုရပြီ။ အဘယ်ကြောင့်ဆိုသော် ကျွန်ုပ်သည် နည်းပညာနှင့် ဗီဒီယိုဂိမ်းများပေါ်ရှိ ဝဘ်ဆိုဒ်အမျိုးမျိုးအတွက် ၅ နှစ်ကျော်ကြာအောင် ရေးသားခဲ့ပြီး လူတိုင်းနားလည်နိုင်သော ဘာသာစကားဖြင့် သင်လိုအပ်သော အချက်အလက်များကို ပေးလိုသည့် ဆောင်းပါးများကို ဖန်တီးနေသောကြောင့် ဖြစ်ပါသည်။
သင့်တွင်မေးခွန်းများရှိပါက၊ ကျွန်ုပ်၏အသိပညာသည် Windows လည်ပတ်မှုစနစ်အပြင် မိုဘိုင်းလ်ဖုန်းများအတွက် Android နှင့်ပတ်သက်သည့်အရာအားလုံးမှပါဝင်ပါသည်။ ပြီးတော့ ငါ့ရဲ့ကတိကဝတ်က မင်းအတွက်ပါပဲ၊ ငါ အမြဲတမ်း မိနစ်အနည်းငယ်လောက် အချိန်ပေးပြီး ဒီအင်တာနက်ကမ္ဘာမှာ မင်းရှိနိုင်သမျှမေးခွန်းတွေကို ဖြေရှင်းဖို့ ကူညီပေးဖို့ ဆန္ဒရှိနေတယ်။