- Alpamayo-R1 är den första VLA-modellen med vision-språk-handling inriktad på autonoma fordon.
- Integrerar steg-för-steg-resonemang i ruttplanering för att hantera komplexa scenarier.
- Det är en öppen modell, baserad på NVIDIA Cosmos Reason och tillgänglig på GitHub och Hugging Face.
- AlpaSim och de öppna datamängderna för fysisk AI stärker validering och experiment med AR1.

Det autonoma körekosystemet tar ett steg framåt med ankomsten av KÖR Alpamayo-R1 (AR1), en modell för artificiell intelligens utformad så att fordon inte bara "ser" omgivningen, utan också förstår den och agerar därefter. Denna nya utveckling från NVIDIA Den positioneras som ett riktmärke för sektorn, särskilt på marknader som Europa och Spaniendär regler och trafiksäkerhet är särskilt stränga.
Denna nya utveckling från NVIDIA presenteras som första VLA-modellen (vision-språk-handling) av öppet resonemang fokuserat specifikt på forskning om autonoma fordonIstället för att bara bearbeta sensordata har Alpamayo-R1 strukturerade resonemangsfunktioner, vilket är nyckeln till att gå mot högre nivåer av autonomi utan att tappa bort transparens och säkerhet i beslutsfattandet ur sikte.
Vad är Alpamayo-R1 och varför markerar det en vändpunkt?

Alpamayo-R1 är en del av en ny generation AI-modeller som kombinerar datorseende, naturlig språkbehandling och konkreta åtgärderDenna VLA-metod gör det möjligt för systemet att ta emot visuell information (kameror, sensorer), beskriva och förklara den med språket, och koppla den till verkliga körbeslut, allt inom samma resonemangsflöde.
Medan andra modeller för autonoma körningar begränsades till att reagera på redan inlärda mönster, fokuserar AR1 på steg-för-steg-resonemang eller tankekedjaintegrera det direkt i ruttplaneringen. Det innebär att fordonet mentalt kan bryta ner en komplex situation, utvärdera alternativ och internt motivera varför det väljer en specifik manöver, vilket gör det enklare för utredare och tillsynsmyndigheter att bedöma.
NVIDIAs satsning med Alpamayo-R1 går utöver att förbättra kontrollalgoritmer: målet är att driva en AI som kan förklara sitt beteendeDetta är särskilt relevant i områden som Europeiska unionen, där spårbarheten av automatiserade beslut och tekniskt ansvar inom transportområdet värderas alltmer.
AR1 är således inte bara en avancerad perceptionsmodell, utan ett verktyg utformat för att hantera den stora utmaningen med säker och människovänlig autonom körningDetta är en aspekt som kommer att vara avgörande för dess faktiska införande på europeiska vägar.
Resonemang i verkliga situationer och komplexa miljöer
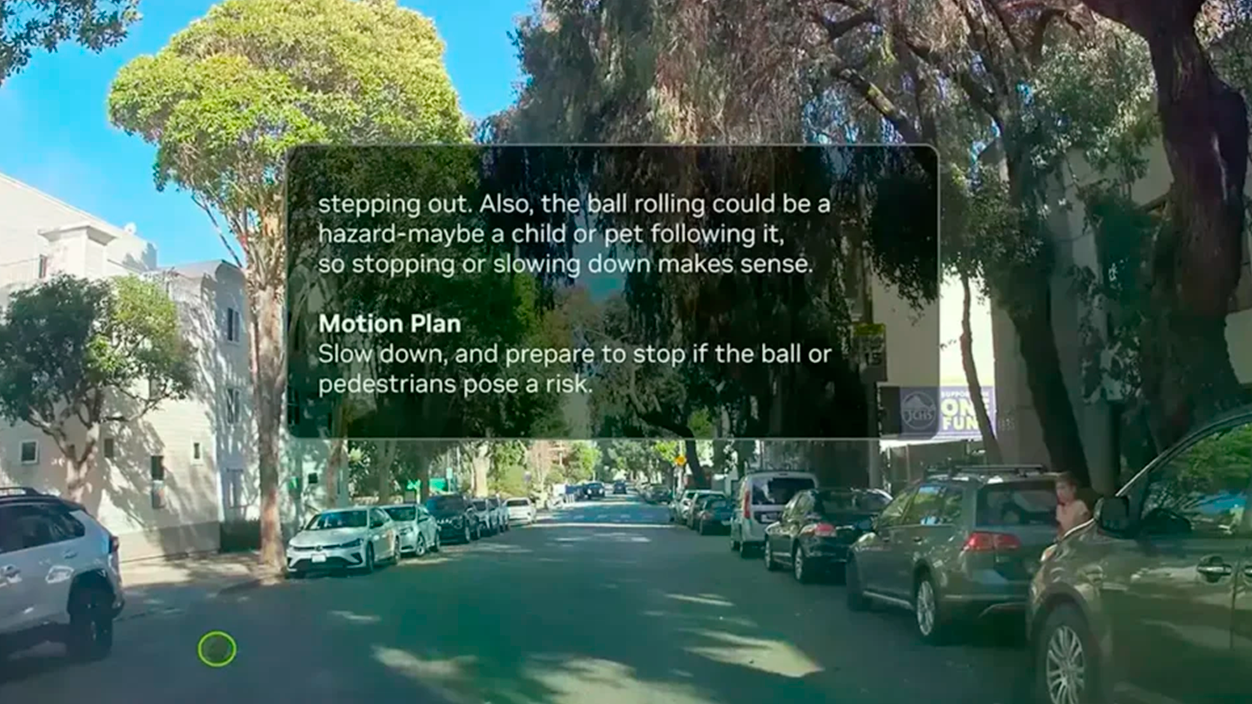
En av styrkorna med Alpamayo-R1 är dess förmåga att hantera urbana miljöer fulla av nyanserdär tidigare modeller tenderade att ha större problem. Övergångsställen där fotgängare närmar sig ett övergångsställe tveksamt, dåligt parkerade fordon som upptar en del av körfältet eller plötsliga vägavstängningar är exempel på sammanhang där enkel objektdetektering inte räcker.
I den här typen av miljöer, AR1 delar upp scenen i små steg i resonemangMed hänsyn till fotgängarrörelser, andra fordons position, skyltning och element som cykelbanor eller lastnings- och lossningszoner. Därifrån, Den utvärderar olika möjliga vägar och väljer den den anser vara säkrast och lämpligast. en tiempo verklig.
Om en autonom bil till exempel kör längs en smal europeisk gata med en parallell cykelbana och många fotgängare, Alpamayo-R1 kan analysera varje segment av rutten, förklara vad den har observerat och hur varje faktor har påverkat dess beslut. att minska hastigheten, öka sidoavståndet eller modifiera banan något.
Den detaljnivån gör det möjligt för forsknings- och utvecklingsteam att granska modellens interna resonemangDetta möjliggör identifiering av potentiella fel eller avvikelser och justering av både träningsdata och kontrollregler. För europeiska städer, med sina historiska centrum, oregelbundna gatustrukturer och mycket varierande trafik, är denna flexibilitet särskilt värdefull.
Dessutom öppnar denna möjlighet att motivera sina val dörren för bättre integration med framtida regleringar. autonoma fordon i Europaeftersom det gör det lättare att visa att systemet har följt en logisk process och är i linje med god trafiksäkerhetspraxis.
Öppen modell baserad på NVIDIA Cosmos Reason
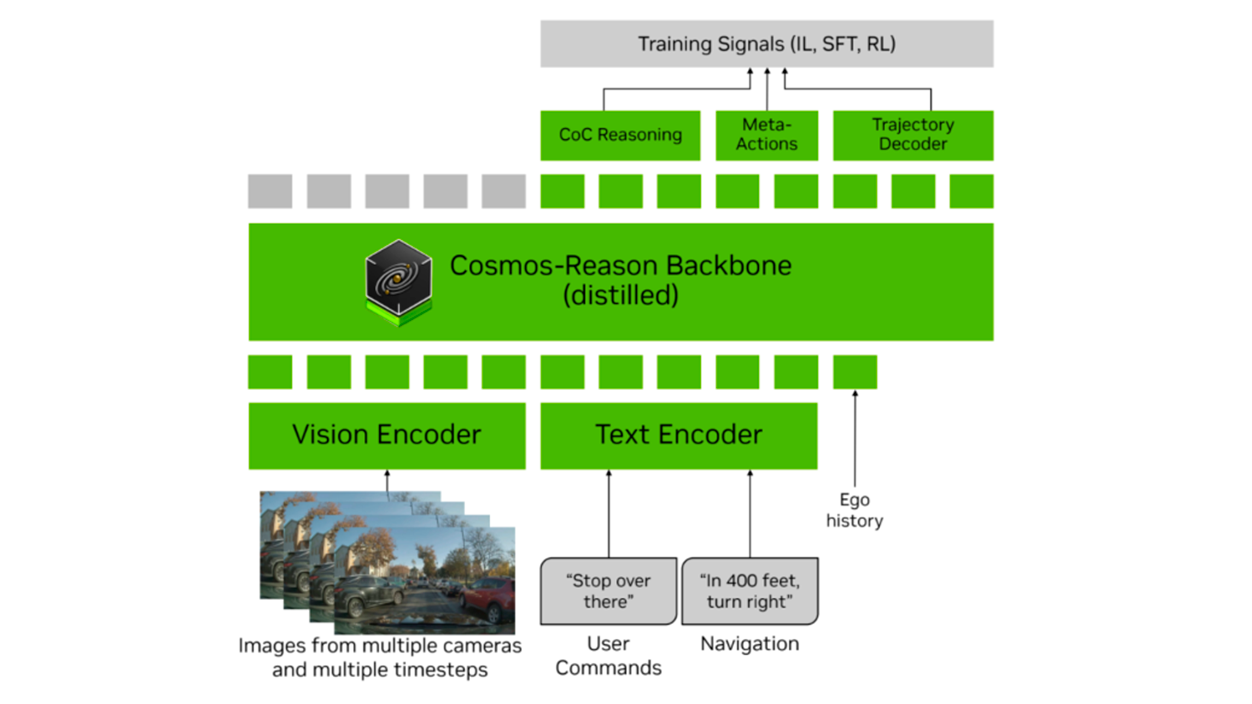
En annan utmärkande aspekt hos Alpamayo-R1 är dess karaktär av öppen forskningsorienterad modellNVIDIA har byggt det på grunden av NVIDIA Cosmos Reason, en plattform inriktad på AI-resonemang som möjliggör kombination av olika informationskällor och strukturering av komplexa beslutsprocesser.
Tack vare denna tekniska bas kan forskare anpassa AR1 till flera experiment och tester som inte har direkta kommersiella syften, från rent akademiska simuleringar till pilotprojekt i samarbete med universitet, teknikcentra eller biltillverkare.
Modellen gynnas särskilt av förstärkning lärandeDenna teknik innebär att systemet förbättrar sin prestanda genom guidad trial and error, och får belöningar eller straff baserat på kvaliteten på sina beslut. Denna metod har visat sig förbättra AR1:s resonemang. successivt förfina sitt sätt att tolka trafiksituationer.
Denna kombination av öppen modell, strukturerat resonemang och avancerad träning positionerar Alpamayo-R1 som en en attraktiv plattform för det europeiska vetenskapssamfundet, intresserad både av att studera autonoma systems beteende och av att utforska nya säkerhetsstandarder och regelverk.
I praktiken gör en tillgänglig modell det enklare för team från olika länder att dela resultat, jämföra metoder och accelerera innovation inom autonom körning, något som kan leda till mer robusta standarder för hela den europeiska marknaden.
Tillgänglighet på GitHub, Hugging Face och öppna data
NVIDIA har bekräftat att Alpamayo-R1 kommer att bli tillgängligt för allmänheten via GitHub och Hugging Face.Dessa är två av de ledande plattformarna för att utveckla och distribuera modeller för artificiell intelligens. Detta drag gör det möjligt för FoU-team, startups och offentliga laboratorier att få tillgång till modellen utan behov av komplexa kommersiella avtal.
Tillsammans med modellen kommer företaget att publicera en del av de dataset som används för sin utbildning. NVIDIA fysiska AI öppna datasetSamlingar fokuserade på fysiska och drivande scenarier som är särskilt användbara för att replikera och utöka experiment som utförs internt.
Denna öppna strategi kan hjälpa europeiska institutioner, såsom forskningscentra inom mobilitet eller EU-finansierade projektIntegrera AR1 i dina tester och jämför dess prestanda med andra system. Det kommer också att göra det enklare att anpassa utvärderingsscenarier till trafikegenskaperna i olika länder, inklusive Spanien.
Publicering i välkända arkiv gör det enklare för utvecklare och forskare att granska modellens beteende, för att föreslå förbättringar och dela ytterligare verktyg, vilket stärker transparensen inom ett område där allmänhetens förtroende är grundläggande.
För den europeiska bilindustrin innebär en tillgänglig referensmodell en möjlighet att förena utvärderingskriterierna och testa nya programvarukomponenter för autonom körning gemensamt, vilket minskar dubbelarbete och påskyndar övergången från prototyper till den verkliga miljön.
AlpaSim: Utvärdering av AR1-prestanda i flera scenarier
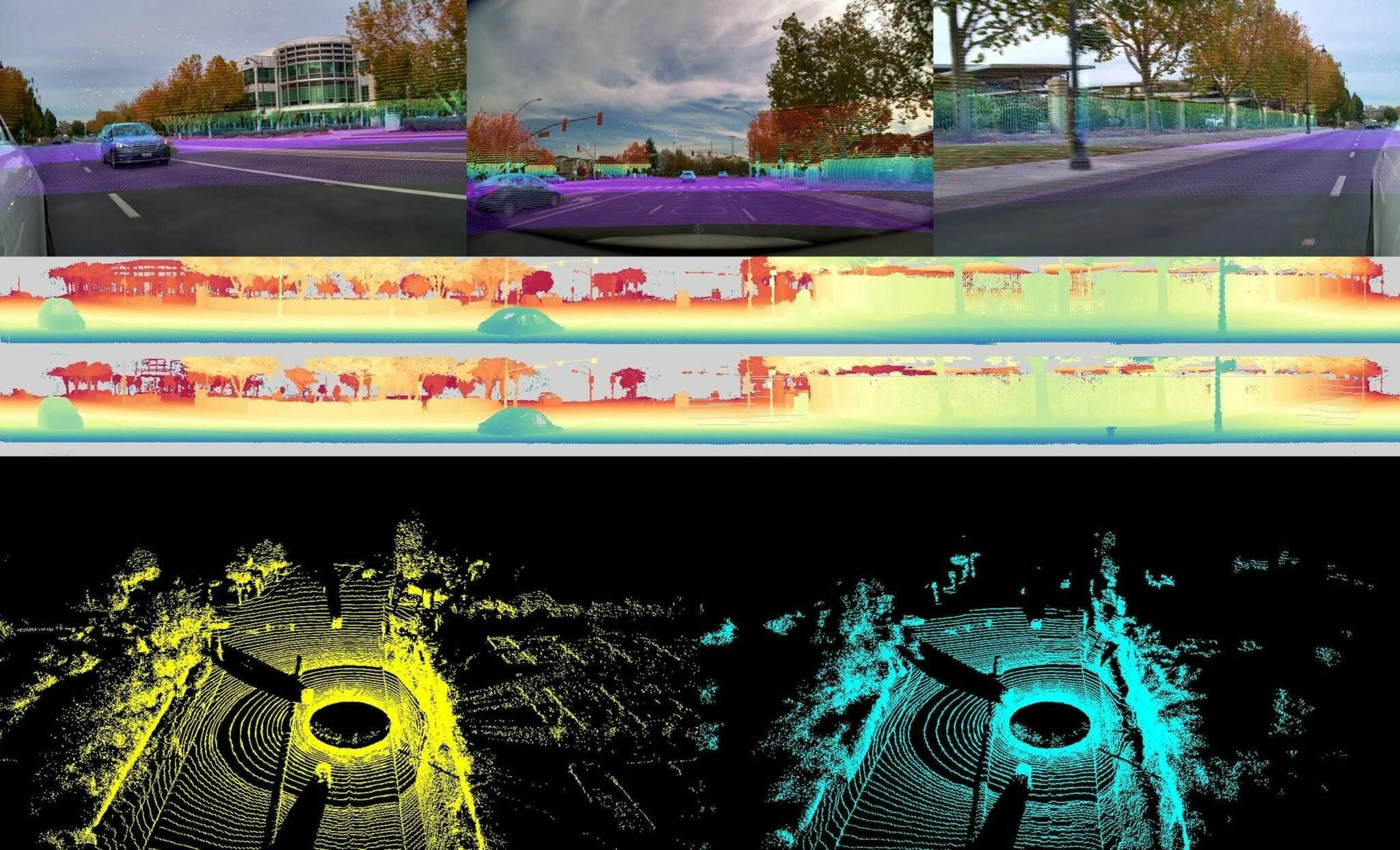
Vid sidan av Alpamayo-R1, NVIDIA har presenterat AlpaSimen öppen källkodsramverk skapat för att testa modellen i en mängd olika sammanhangTanken är att ha en standardiserat bedömningsverktyg som möjliggör jämförelse av AR1:s beteende i olika trafik-, väder- och stadsplaneringssituationer.
Med AlpaSim, forskare kan generera syntetiska och realistiska scenarier som replikerar allt från flerfiliga motorvägar till typiska rondeller i europeiska städer, inklusive bostadsområden med trafikludd eller skolzoner med en hög närvaro av fotgängare.
Ramverket Den är utformad för att mäta både kvantitativa mätvärden (reaktionstid, säkerhetsavstånd, efterlevnad av föreskrifter) som kvalitativ, relaterat till Alpamayo-R1:s steg-för-steg-resonemang och deras förmåga att motivera varför de har valt en specifik rutt eller manöver.
Denna metod gör det enklare för europeiska team att anpassa sina tester till EU-regleringskravsom vanligtvis kräver detaljerade bevis på autonoma systems beteende i kontrollerade miljöer innan man godkänner tester på allmän väg.
I slutändan, AlpaSim blir ett naturligt komplement till AR1, eftersom det erbjuder den ideala miljön för iterera, justera och validera förbättringar av modellen utan att behöva utsätta verkliga användare för situationer som ännu inte är tillräckligt testade.
Kombinationen av öppen VLA-modell, fysiska datamängder och simuleringsramverk Detta placerar NVIDIA i en relevant position i debatten om hur framtida autonoma fordon bör testas och certifieras i Europa och i förlängningen i resten av världen.
Med alla dessa element framstår Alpamayo-R1 som en viktig plattform för forskarsamhället och industrin för att utforska nya sätt att köra automatiserat, och bidra större transparens, analytisk kapacitet och säkerhet till ett område som fortfarande är under reglerings- och teknisk utveckling.

Jag är en teknikentusiast som har gjort sina "nördar"-intressen till ett yrke. Jag har tillbringat mer än 10 år av mitt liv med att använda den senaste tekniken och mixtrat med alla typer av program av ren nyfikenhet. Nu har jag specialiserat mig på datateknik och tv-spel. Detta beror på att jag i mer än 5 år har arbetat med att skriva för olika webbplatser om teknik och videospel, skapa artiklar som försöker ge dig den information du behöver på ett språk som är begripligt för alla.
Om du har några frågor sträcker sig min kunskap från allt som rör operativsystemet Windows samt Android för mobiltelefoner. Och mitt engagemang är för dig, jag är alltid villig att spendera några minuter och hjälpa dig att lösa alla frågor du kan ha i den här internetvärlden.