- Alpamayo-R1 เป็นโมเดล VLA รุ่นแรกที่มีวิสัยทัศน์-ภาษา-แอคชั่นที่มุ่งเน้นไปที่ยานยนต์ไร้คนขับ
- บูรณาการการใช้เหตุผลแบบทีละขั้นตอนเข้ากับการวางแผนเส้นทางเพื่อจัดการกับสถานการณ์ที่ซับซ้อน
- เป็นโมเดลแบบเปิดที่อิงตาม NVIDIA Cosmos Reason และพร้อมใช้งานบน GitHub และ Hugging Face
- AlpaSim และ Physical AI Open Dataset ช่วยเสริมการตรวจสอบและการทดลองกับ AR1

ระบบนิเวศการขับขี่อัตโนมัติก้าวไปอีกขั้นด้วยการมาถึงของ ไดรฟ์ อัลปามาโย-R1 (AR1)ซึ่งเป็นโมเดลปัญญาประดิษฐ์ที่ออกแบบมาเพื่อให้ยานพาหนะไม่เพียงแค่ "มองเห็น" สภาพแวดล้อม แต่ยังเข้าใจและดำเนินการตามนั้นด้วย การพัฒนาใหม่นี้จาก NVIDIA มีการวางตำแหน่งเป็นมาตรฐานสำหรับภาคส่วนโดยเฉพาะในตลาดเช่น ยุโรปและสเปนซึ่งมีกฎระเบียบและความปลอดภัยบนท้องถนนที่เข้มงวดเป็นพิเศษ
การพัฒนาใหม่นี้จาก NVIDIA ได้รับการนำเสนอเป็น แบบจำลอง VLA แรก (วิสัยทัศน์-ภาษา-การกระทำ) ของการใช้เหตุผลแบบเปิดที่มุ่งเน้นเฉพาะที่ การวิจัยเกี่ยวกับยานยนต์ไร้คนขับแทนที่จะประมวลผลข้อมูลเซ็นเซอร์เพียงอย่างเดียว Alpamayo-R1 จะผสานรวมความสามารถในการใช้เหตุผลแบบมีโครงสร้าง ซึ่งถือเป็นกุญแจสำคัญในการก้าวไปสู่ระดับความเป็นอิสระที่สูงขึ้น โดยไม่ละเลยความโปร่งใสและความปลอดภัยในการตัดสินใจ
Alpamayo-R1 คืออะไร และเหตุใดจึงถือเป็นจุดเปลี่ยน?

Alpamayo-R1 เป็นส่วนหนึ่งของโมเดล AI รุ่นใหม่ที่ผสมผสาน การมองเห็นด้วยคอมพิวเตอร์ การประมวลผลภาษาธรรมชาติ และการดำเนินการที่เป็นรูปธรรมแนวทาง VLA นี้ช่วยให้ระบบสามารถรับข้อมูลภาพ (กล้อง เซ็นเซอร์) อธิบายและอธิบายเป็นภาษา และเชื่อมโยงเข้ากับการตัดสินใจขับขี่จริง ทั้งหมดนี้ภายในกระบวนการใช้เหตุผลเดียวกัน
ในขณะที่โมเดลการขับขี่อัตโนมัติอื่นๆ ถูกจำกัดให้ตอบสนองต่อรูปแบบที่เรียนรู้ไปแล้ว AR1 มุ่งเน้นไปที่ การใช้เหตุผลแบบขั้นตอนหรือลำดับความคิดโดยบูรณาการเข้ากับการวางแผนเส้นทางโดยตรง ซึ่งหมายความว่ายานพาหนะสามารถวิเคราะห์สถานการณ์ที่ซับซ้อน ประเมินทางเลือก และให้เหตุผลภายในว่าทำไมจึงเลือกวิธีการเฉพาะเจาะจง ทำให้ผู้ตรวจสอบและหน่วยงานกำกับดูแลสามารถประเมินได้ง่ายขึ้น
การเดิมพันของ NVIDIA กับ Alpamayo-R1 ไม่ใช่แค่การปรับปรุงอัลกอริทึมการควบคุมเท่านั้น แต่ยังมีเป้าหมายเพื่อขับเคลื่อน AI ที่สามารถอธิบายพฤติกรรมของตัวเองได้สิ่งนี้มีความเกี่ยวข้องอย่างยิ่งในพื้นที่ต่างๆ เช่น สหภาพยุโรป ซึ่งการติดตามการตัดสินใจอัตโนมัติและความรับผิดชอบด้านเทคโนโลยีในด้านการขนส่งได้รับการให้ความสำคัญเพิ่มมากขึ้น
ดังนั้น AR1 จึงไม่ใช่เพียงโมเดลการรับรู้ขั้นสูงเท่านั้น แต่เป็นเครื่องมือที่ออกแบบมาเพื่อรับมือกับความท้าทายที่ยิ่งใหญ่ การขับขี่อัตโนมัติที่ปลอดภัยและเป็นมิตรต่อมนุษย์นี่คือประเด็นสำคัญสำหรับการนำไปใช้จริงบนท้องถนนในยุโรป
การใช้เหตุผลในสถานการณ์จริงและสภาพแวดล้อมที่ซับซ้อน
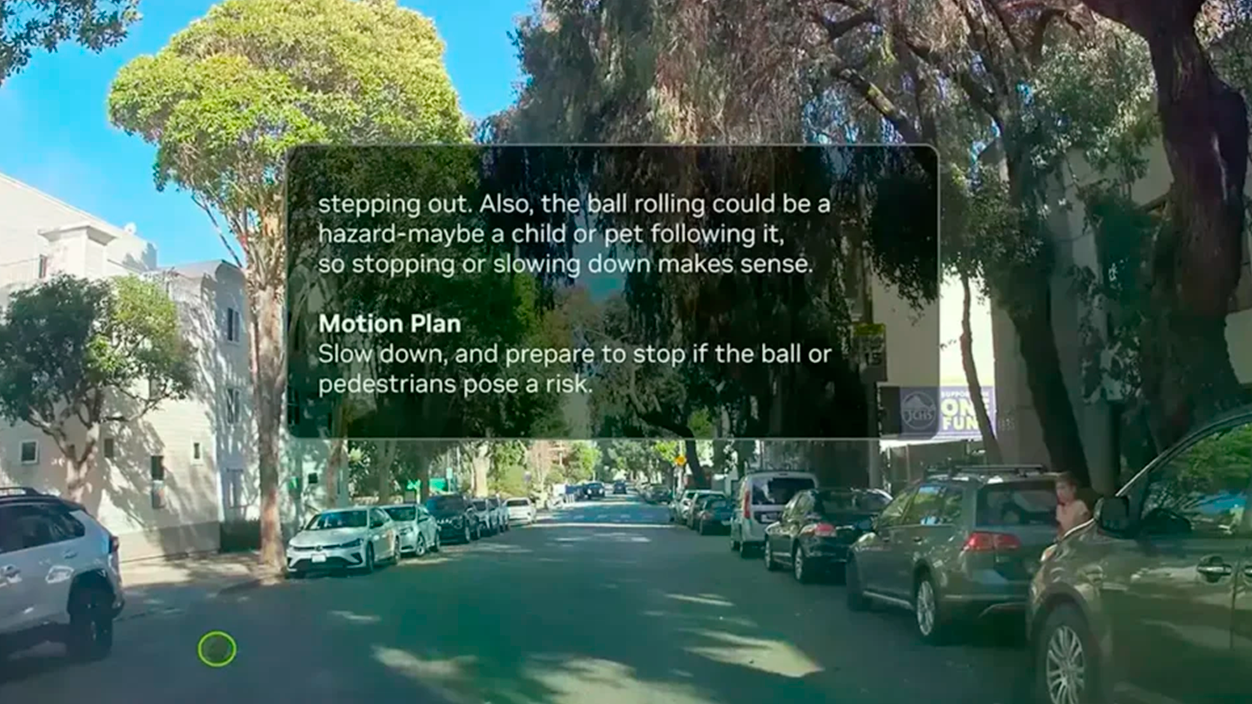
จุดแข็งประการหนึ่งของ Alpamayo-R1 คือ ความสามารถในการจัดการ สภาพแวดล้อมในเมืองที่เต็มไปด้วยความละเอียดอ่อนซึ่งโมเดลก่อนหน้านี้มักจะมีปัญหามากกว่า เช่น ทางม้าลายที่มีคนเดินถนนเดินข้ามทางม้าลายอย่างลังเล รถจอดขวางเลนบางส่วน หรือการปิดถนนกะทันหัน ล้วนเป็นตัวอย่างของสถานการณ์ที่การตรวจจับวัตถุเพียงอย่างเดียวไม่เพียงพอ
ในสภาพแวดล้อมประเภทนี้ AR1 แบ่งฉากออกเป็น ก้าวเล็กๆ ของการใช้เหตุผลโดยคำนึงถึงการเคลื่อนที่ของคนเดินเท้า ตำแหน่งของยานพาหนะอื่น ป้ายบอกทาง และองค์ประกอบต่างๆ เช่น เลนจักรยาน หรือโซนสำหรับขนถ่ายสินค้า จากนั้น มันจะประเมินเส้นทางที่เป็นไปได้ต่างๆ และเลือกเส้นทางที่ถือว่าปลอดภัยและเหมาะสมที่สุด en Tiempo จริง
หากรถยนต์ไร้คนขับกำลังขับไปตามถนนแคบๆ ในยุโรปที่มีเลนจักรยานขนานกันและมีคนเดินถนนจำนวนมาก Alpamayo-R1 สามารถวิเคราะห์แต่ละส่วนของเส้นทาง อธิบายสิ่งที่สังเกตได้ และอธิบายปัจจัยแต่ละอย่างมีอิทธิพลต่อการตัดสินใจอย่างไร เพื่อลดความเร็ว เพิ่มระยะทางด้านข้าง หรือปรับวิถีเล็กน้อย
ระดับรายละเอียดนั้นช่วยให้ทีมวิจัยและพัฒนาสามารถตรวจสอบได้ การใช้เหตุผลภายในของแบบจำลองวิธีนี้ช่วยให้สามารถระบุข้อผิดพลาดหรือความคลาดเคลื่อนที่อาจเกิดขึ้น และสามารถปรับข้อมูลการฝึกอบรมและกฎการควบคุมได้ สำหรับเมืองต่างๆ ในยุโรปที่มีศูนย์กลางทางประวัติศาสตร์ รูปแบบถนนที่ไม่สม่ำเสมอ และปริมาณการจราจรที่ผันผวนอย่างมาก ความยืดหยุ่นนี้จึงมีประโยชน์อย่างยิ่ง
ยิ่งไปกว่านั้น ความสามารถในการพิสูจน์ทางเลือกของตนยังเปิดโอกาสให้มีการบูรณาการกับกฎระเบียบในอนาคตได้ดียิ่งขึ้น รถยนต์ไร้คนขับในยุโรปเนื่องจากทำให้แสดงให้เห็นได้ง่ายขึ้นว่าระบบได้ปฏิบัติตามกระบวนการเชิงตรรกะและสอดคล้องกับแนวปฏิบัติความปลอดภัยบนท้องถนนที่ดี
โมเดลเปิดตามเหตุผลของ NVIDIA Cosmos
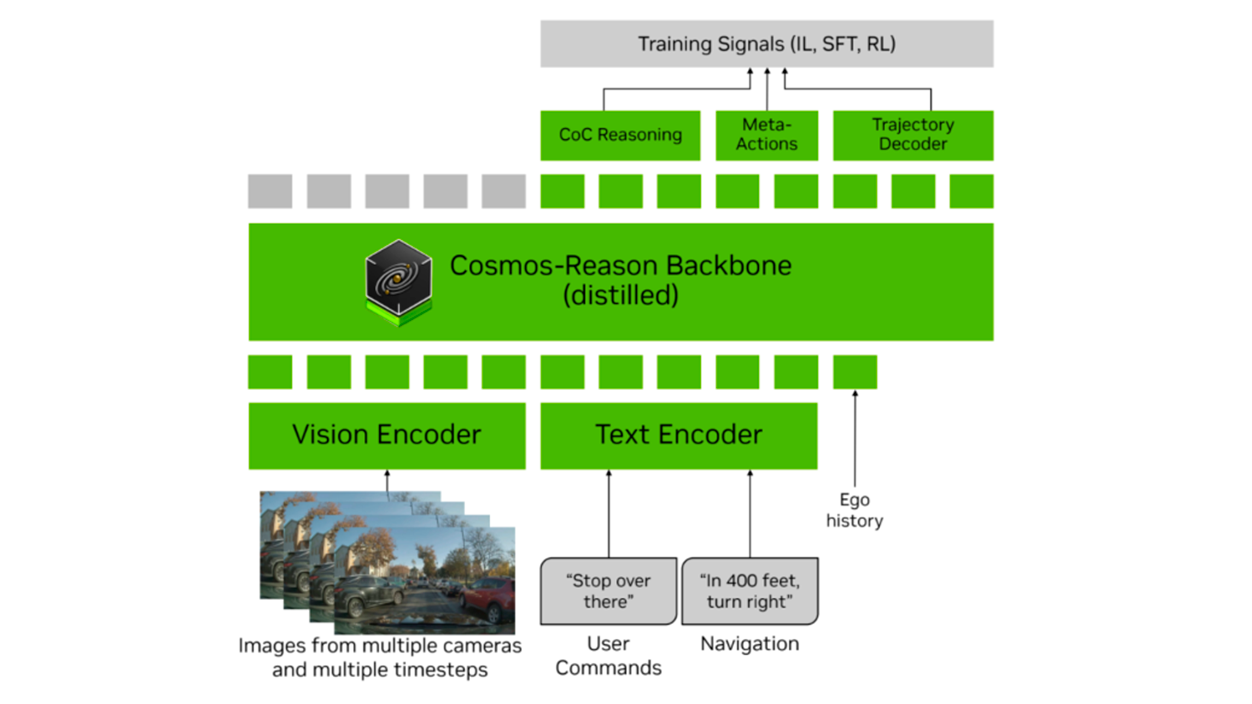
ลักษณะเด่นอีกประการหนึ่งของ Alpamayo-R1 คือลักษณะของ แบบจำลองเชิงวิจัยแบบเปิดNVIDIA ได้สร้างมันขึ้นมาบนรากฐานของ เหตุผลของ NVIDIA Cosmosแพลตฟอร์มที่เน้นการใช้เหตุผลด้วย AI ซึ่งช่วยให้สามารถรวมแหล่งข้อมูลที่แตกต่างกันและจัดโครงสร้างกระบวนการตัดสินใจที่ซับซ้อนได้
ด้วยฐานเทคโนโลยีนี้ นักวิจัยสามารถ ปรับ AR1 ให้เหมาะกับการทดลองและการทดสอบต่างๆ ที่ไม่มีวัตถุประสงค์เชิงพาณิชย์โดยตรง ไม่ว่าจะเป็นการจำลองทางวิชาการล้วนๆ ไปจนถึงโครงการนำร่องที่ร่วมมือกับมหาวิทยาลัย ศูนย์เทคโนโลยี หรือผู้ผลิตยานยนต์
แบบจำลองนี้ได้รับประโยชน์โดยเฉพาะจาก การเรียนรู้แบบเสริมกำลังเทคนิคนี้เกี่ยวข้องกับการปรับปรุงประสิทธิภาพของระบบผ่านการลองผิดลองถูกแบบมีแนวทาง โดยได้รับรางวัลหรือบทลงโทษตามคุณภาพของการตัดสินใจ วิธีนี้ได้รับการพิสูจน์แล้วว่าช่วยเพิ่มประสิทธิภาพการใช้เหตุผลของ AR1 ปรับปรุงวิธีการตีความสถานการณ์การจราจรอย่างต่อเนื่อง.
การผสมผสานระหว่างโมเดลเปิด การใช้เหตุผลแบบมีโครงสร้าง และการฝึกอบรมขั้นสูงทำให้ Alpamayo-R1 เป็น แพลตฟอร์มที่น่าดึงดูดสำหรับชุมชนวิทยาศาสตร์ยุโรปมีความสนใจทั้งในการศึกษาพฤติกรรมของระบบอัตโนมัติและการสำรวจมาตรฐานความปลอดภัยและกรอบการกำกับดูแลใหม่ๆ
ในทางปฏิบัติ การมีโมเดลที่เข้าถึงได้ทำให้ทีมจากประเทศต่างๆ เข้าถึงได้ง่ายขึ้น แบ่งปันผลลัพธ์ เปรียบเทียบแนวทาง และเร่งสร้างนวัตกรรม ในการขับขี่อัตโนมัติ ซึ่งเป็นสิ่งที่สามารถแปลเป็นมาตรฐานที่เข้มงวดยิ่งขึ้นสำหรับตลาดยุโรปทั้งหมดได้
ความพร้อมใช้งานบน GitHub, Hugging Face และข้อมูลเปิด
NVIDIA ยืนยันว่า Alpamayo-R1 จะเผยแพร่สู่สาธารณะผ่าน GitHub และ Hugging Faceแพลตฟอร์มเหล่านี้คือสองแพลตฟอร์มชั้นนำสำหรับการพัฒนาและเผยแพร่โมเดลปัญญาประดิษฐ์ การเคลื่อนไหวครั้งนี้ช่วยให้ทีมวิจัยและพัฒนา สตาร์ทอัพ และห้องปฏิบัติการสาธารณะสามารถเข้าถึงโมเดลดังกล่าวได้โดยไม่ต้องมีข้อตกลงเชิงพาณิชย์ที่ซับซ้อน
นอกจากโมเดลดังกล่าวแล้ว บริษัทจะเผยแพร่ชุดข้อมูลบางส่วนที่ใช้ในการฝึกอบรม ชุดข้อมูลเปิด NVIDIA Physical AIคอลเลกชันที่เน้นไปที่สถานการณ์ทางกายภาพและการขับขี่ซึ่งมีประโยชน์โดยเฉพาะในการจำลองและขยายการทดลองที่ดำเนินการภายใน
แนวทางแบบเปิดนี้สามารถช่วยเหลือสถาบันในยุโรป เช่น ศูนย์วิจัยด้านการเคลื่อนที่หรือโครงการที่ได้รับทุนจากสหภาพยุโรปผสานรวม AR1 เข้ากับการทดสอบของคุณและเปรียบเทียบประสิทธิภาพกับระบบอื่นๆ นอกจากนี้ยังช่วยให้ปรับสถานการณ์การประเมินให้สอดคล้องกับลักษณะการจราจรของประเทศต่างๆ ได้ง่ายขึ้น รวมถึงสเปนด้วย
การเผยแพร่ในคลังข้อมูลที่เป็นที่รู้จักอย่างกว้างขวางทำให้ผู้พัฒนาและนักวิทยาศาสตร์ทำได้ง่ายขึ้น ตรวจสอบพฤติกรรมของโมเดลเพื่อเสนอการปรับปรุงและแบ่งปันเครื่องมือเพิ่มเติมเพื่อเสริมสร้างความโปร่งใสในสาขาที่ความไว้วางใจของสาธารณะเป็นสิ่งสำคัญ
สำหรับอุตสาหกรรมยานยนต์ในยุโรป การมีโมเดลมาตรฐานที่เข้าถึงได้ถือเป็นโอกาส เกณฑ์การประเมินแบบรวม และทดสอบส่วนประกอบซอฟต์แวร์การขับขี่อัตโนมัติใหม่ ๆ ร่วมกัน ช่วยลดการทำงานซ้ำซ้อน และเร่งการเปลี่ยนผ่านจากต้นแบบไปสู่สภาพแวดล้อมจริง
AlpaSim: การประเมินประสิทธิภาพ AR1 ในสถานการณ์ต่างๆ
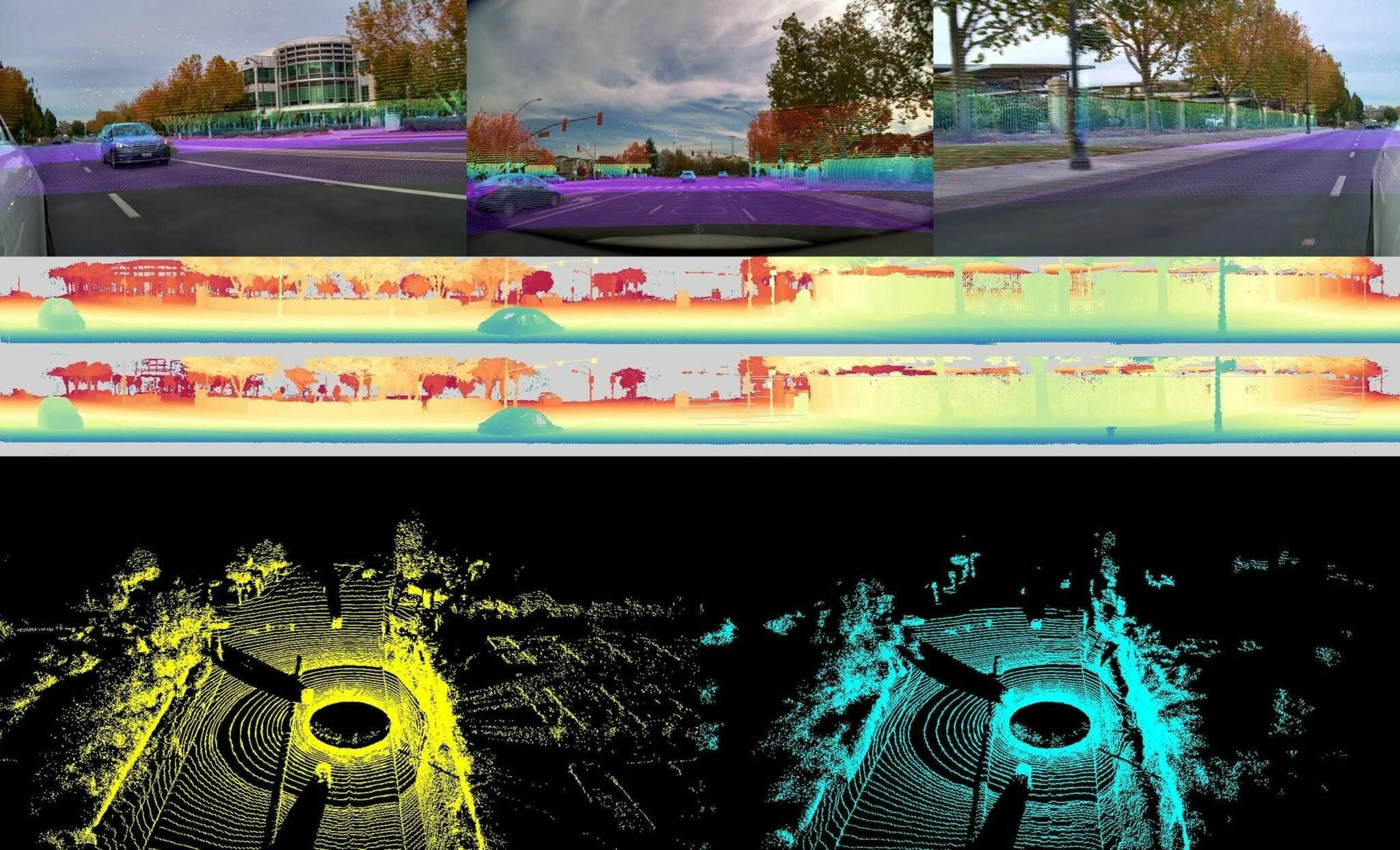
เคียงข้างกับ Alpamayo-R1 NVIDIA ได้นำเสนอ อัลปาซิมเป็น กรอบงานโอเพ่นซอร์สที่สร้างขึ้นเพื่อทดสอบโมเดลในบริบทที่หลากหลายความคิดคือการมีหนึ่ง เครื่องมือประเมินมาตรฐาน ซึ่งช่วยให้สามารถเปรียบเทียบพฤติกรรมของ AR1 ในสถานการณ์การจราจร สภาพอากาศ และการออกแบบเมืองที่แตกต่างกันได้
ด้วย AlpaSim นักวิจัยสามารถสร้าง สถานการณ์จำลองและสมจริง ซึ่งจำลองทุกอย่างตั้งแต่ทางหลวงหลายเลนไปจนถึงวงเวียนทั่วไปในเมืองต่างๆ ของยุโรป รวมถึงเขตที่อยู่อาศัยที่มีการจราจรสงบ หรือเขตโรงเรียนที่มีคนเดินถนนจำนวนมาก
กรอบการทำงาน ได้รับการออกแบบมาเพื่อวัดทั้งตัวชี้วัดเชิงปริมาณ (เวลาตอบสนอง, ระยะห่างปลอดภัย, การปฏิบัติตามกฎระเบียบ) เป็นเชิงคุณภาพ, เกี่ยวข้องกับ การให้เหตุผลแบบทีละขั้นตอนของ Alpamayo-R1 และความสามารถในการให้เหตุผลว่าทำไมพวกเขาจึงเลือกเส้นทางหรือการเคลื่อนไหวเฉพาะเจาะจง
แนวทางนี้ทำให้ทีมในยุโรปสามารถจัดแนวการทดสอบให้สอดคล้องกับ ข้อกำหนดด้านกฎระเบียบของสหภาพยุโรปซึ่งโดยปกติต้องมีหลักฐานโดยละเอียดเกี่ยวกับพฤติกรรมของระบบอัตโนมัติในสภาพแวดล้อมที่มีการควบคุม ก่อนที่จะอนุมัติการทดสอบบนถนนเปิด
ในท้ายที่สุด AlpaSim กลายเป็นส่วนเสริมตามธรรมชาติของ AR1เนื่องจากมีสภาพแวดล้อมที่เหมาะสมสำหรับ ทำซ้ำ ปรับ และตรวจสอบ การปรับปรุงโมเดลโดยไม่จำเป็นต้องให้ผู้ใช้จริงเผชิญกับสถานการณ์ที่ยังไม่ได้รับการทดสอบอย่างเพียงพอ
การรวมกันของ แบบจำลอง VLA แบบเปิด ชุดข้อมูลทางกายภาพ และกรอบการจำลอง ซึ่งทำให้ NVIDIA อยู่ในตำแหน่งที่เกี่ยวข้องในการอภิปรายเกี่ยวกับวิธีการทดสอบและรับรองยานยนต์ไร้คนขับในอนาคตในยุโรป และขยายไปยังส่วนอื่นๆ ของโลกด้วย
ด้วยองค์ประกอบทั้งหมดนี้ Alpamayo-R1 จึงกลายเป็นแพลตฟอร์มสำคัญสำหรับชุมชนวิทยาศาสตร์และอุตสาหกรรมเพื่อสำรวจวิธีการใหม่ๆ ในการขับขี่แบบอัตโนมัติ ซึ่งมีส่วนสนับสนุน ความโปร่งใส ความสามารถในการวิเคราะห์ และความปลอดภัยที่มากขึ้น สู่สาขาที่ยังอยู่ระหว่างการพัฒนากฎระเบียบและเทคโนโลยี

ฉันเป็นผู้ชื่นชอบเทคโนโลยีที่เปลี่ยนความสนใจ "เกินบรรยาย" ของเขาให้กลายเป็นอาชีพ ฉันใช้เวลามากกว่า 10 ปีในชีวิตไปกับเทคโนโลยีล้ำสมัยและปรับแต่งโปรแกรมทุกประเภทด้วยความอยากรู้อยากเห็น ตอนนี้ฉันมีความเชี่ยวชาญในด้านเทคโนโลยีคอมพิวเตอร์และวิดีโอเกม เนื่องจากเป็นเวลากว่า 5 ปีแล้วที่ฉันเขียนให้กับเว็บไซต์ต่างๆ เกี่ยวกับเทคโนโลยีและวิดีโอเกม โดยสร้างบทความที่พยายามให้ข้อมูลที่คุณต้องการในภาษาที่ทุกคนเข้าใจได้
หากคุณมีคำถามใดๆ ความรู้ของฉันมีตั้งแต่ทุกอย่างที่เกี่ยวข้องกับระบบปฏิบัติการ Windows รวมถึง Android สำหรับโทรศัพท์มือถือ และความมุ่งมั่นของฉันคือคุณ ฉันยินดีสละเวลาสักครู่เสมอและช่วยคุณแก้ไขคำถามใดๆ ที่คุณอาจมีในโลกอินเทอร์เน็ตนี้