- Corleo 是川崎重工在 2025 年大阪关西世博会上推出的四足机器人原型。
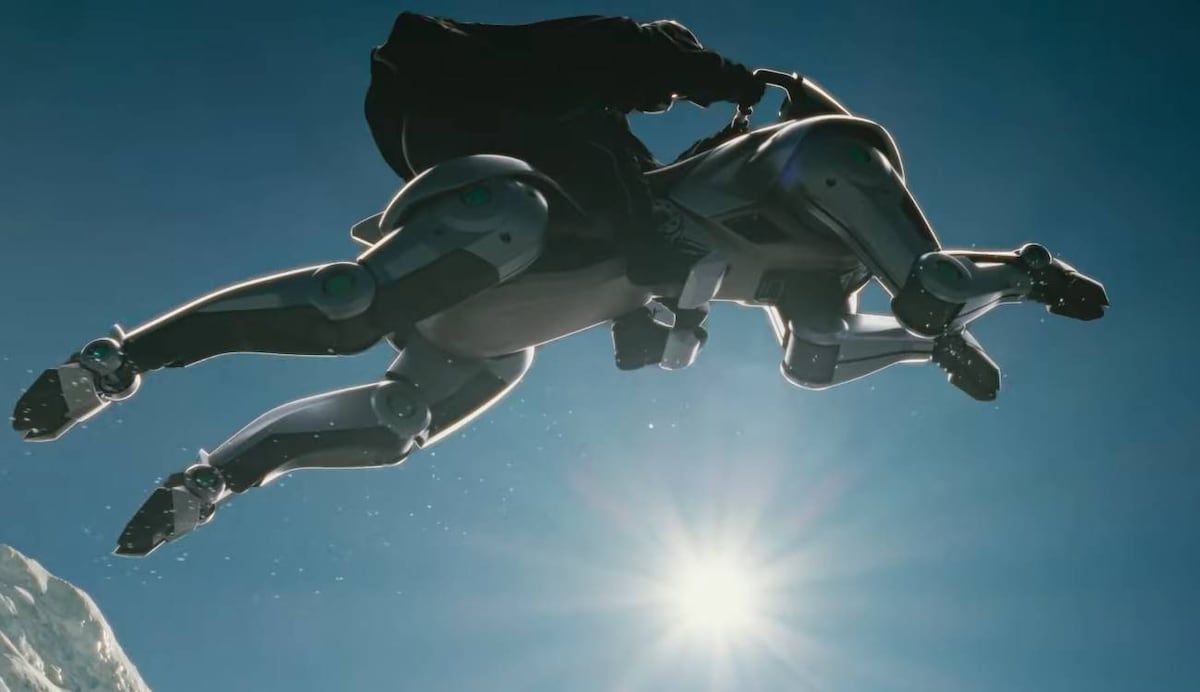
- 这匹机器马借助其铰接式腿部系统和氢发动机,能够在复杂的地形上移动。
- 驾驶基于身体运动,无需传统的刹车或油门。
- 它具有导航屏幕和投影技术,以方便定位和安全。
穿越崎岖的地形、越过棘手的障碍物或探索山区似乎不再是传统越野车的专利。至少这是川崎提出的前提 这一概念彻底改变了个人出行的世界: Corleo,一款模拟骑马体验的四足机器人,但却带有一种完全未来主义的气息。
科里奥 在 2025 年大阪关西世博会上作为原型展示,并没有让任何人无动于衷。这匹机械马的灵感来自大自然,尽管明显以机器人为中心,但它为如何在开阔空间或传统车辆难以进入的空间中导航引入了新范式。
拥有马之灵魂、想要征服高山的机器人
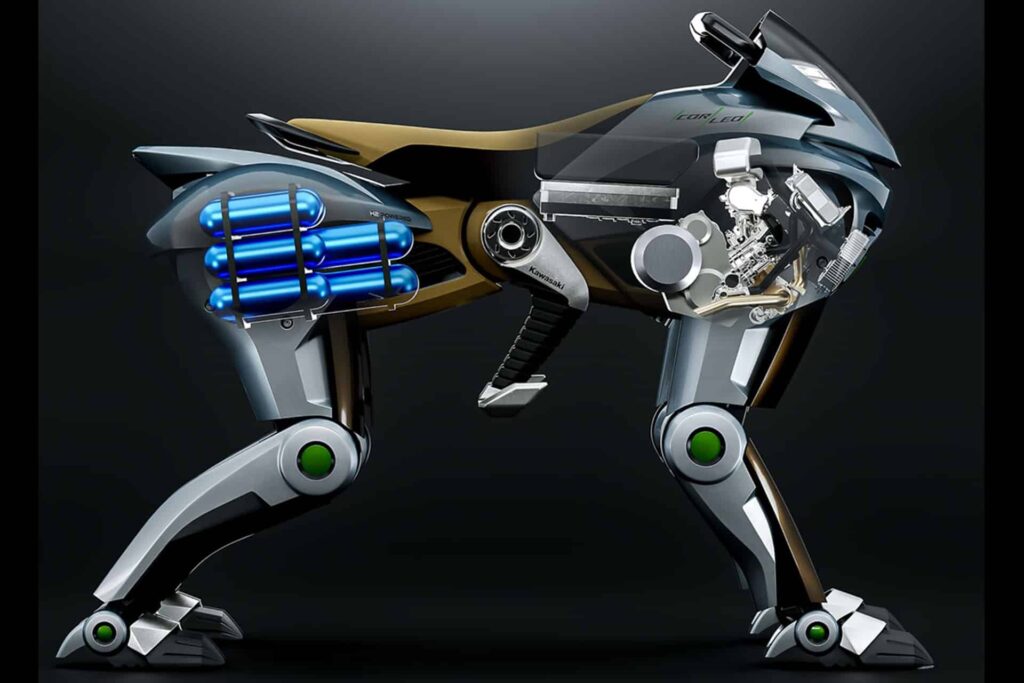
川崎选择了一种融合机器人工程、人工智能和环境可持续性的设计。。 Corleo 没有轮子。相反,它用四条铰接腿行走和奔跑。每个蹄子的末端都是一种分裂的橡胶蹄,旨在提高牵引力并适应岩石、沙子或雪等具有挑战性的表面。
该结构允许前腿和后腿之间独立悬挂,有助于在行走和小跑时吸收冲击。这意味着 更加流畅、自然和安全的运动,即使在陡坡或斜坡等复杂场景中。
至于它的处理, Corleo 没有传统的车把或踏板。相反,飞行员成为控制系统的主动部分。机器人利用脚踏板和转向系统中的传感器,检测用户的重量变化位置并做出相应的反应。基本上,车辆会对身体动作立即做出反应,就像真正的马一样。
舒适度也得到了充分考虑因为脚凳高度可调,而且根据概念的某些版本,座椅甚至可以容纳第二名乘客。该设计旨在保持符合人体工程学的姿势,无需在爬坡时弯腰,确保可视性和持续的平衡。
清洁能源和智能自主:Corleo 的核心

这个四足机器人的支柱之一是其可持续推进系统。 Corleo 配备 150 cc 小型内燃机,其唯一功能是利用位于车辆后部的储氢罐中储存的氢气发电。这些电力为每条腿上的独立电动机提供动力。
得益于这一能源解决方案, 车辆不排放污染气体,从生态角度来看,这是一个潜在的可行选择。此外,这种配置允许您谨慎操作,减少其他机动车辆常见的噪音污染。这种移动性的演变也与多年来开发的创新技术有关。
目前尚未确认官方的续航里程或速度数据,但一些报道表明,在良好条件下,每次充电可行驶 240 公里,行驶速度接近 80 公里/小时。 然而, 由于它是一个概念原型, 这些数据尚未得到验证.
导航系统在用户体验中也发挥着重要作用。 Corleo 在座椅前方设有一块数字屏幕, 提供氢气水平、计划路线、重心等重要信息和其他相关数据。晚上,系统本身会将信号投射到地面上, 帮助在黑暗或视线不清的区域定位.
正在建设中的未来:对 Corleo 有何期待
尽管产生了期望, Corleo 目前不出售,并且近期也不会出售。。川崎在此次博览会上亮相的机器人还只是概念,甚至它的一些更先进的功能还处于开发阶段。从公司本身来看 他们表示,预计 2050 年之前不会拥有功能齐全的模型。.
然而,这并不意味着 Corleo 仅仅是一种视觉演示。 它的推出是川崎探索新形式个人出行的更广泛战略的一部分。,包括为那些需要在传统车辆不可行或不实用的环境中行驶的人提供的解决方案。
一些人认为机器马可以作为休闲娱乐、自然旅游等领域的潜在工具,甚至可以为寻求可控户外体验的行动不便人士提供辅助。 该设计旨在始终保持安全性和舒适性,也增强了其在乡村和山区环境中的潜在应用。.
Corleo 的设计也旨在提供不同的感官和情感体验。这不仅仅是为了四处走动,而是为了与环境建立联系,感受脚下或机械腿下的地面,并从不同的角度重新发现大自然。该品牌总结道, 释放人类的“运动本能”.
这款独特的川崎原型车彻底改变了我们理解个人交通的方式:除了速度、动力或设计之外, Corleo 邀请您想象一个移动性同时具有智能、生态和情感的世界。。尽管还有很长的路要走,但新的出行方式的种子已经种下。
我是一名技术爱好者,已将自己的“极客”兴趣变成了职业。出于纯粹的好奇心,我花了 10 多年的时间使用尖端技术并修改各种程序。现在我专攻计算机技术和视频游戏。这是因为 5 年多来,我一直在为各种技术和视频游戏网站撰写文章,旨在以每个人都能理解的语言为您提供所需的信息。
如果您有任何疑问,我的知识范围涵盖与 Windows 操作系统以及手机 Android 相关的所有内容。我对您的承诺是,我总是愿意花几分钟帮助您解决在这个互联网世界中可能遇到的任何问题。