- Alpamayo-R1 er den første vision-sprog-handling VLA-model orienteret mod selvkørende køretøjer.
- Integrerer trinvis ræsonnement i ruteplanlægning for at håndtere komplekse scenarier.
- Det er en åben model, baseret på NVIDIA Cosmos Reason og tilgængelig på GitHub og Hugging Face.
- AlpaSim og de åbne datasæt for fysisk AI styrker validering og eksperimentering med AR1.

Det autonome køreøkosystem tager et skridt fremad med ankomsten af DRIVE Alpamayo-R1 (AR1), en kunstig intelligens-model designet således, at køretøjer ikke blot "ser" omgivelserne, men også forstår dem og handler i overensstemmelse hermed. Denne nye udvikling fra NVIDIA Den er positioneret som en benchmark for sektoren, især på markeder som f.eks. Europa og Spanienhvor reglerne og trafiksikkerheden er særligt strenge.
Denne nye udvikling fra NVIDIA præsenteres som første VLA-model (vision-sprog-handling) af åben ræsonnement fokuseret specifikt på forskning i selvkørende køretøjerI stedet for blot at behandle sensordata inkorporerer Alpamayo-R1 strukturerede ræsonnementsfunktioner, hvilket er nøglen til at bevæge sig mod højere niveauer af autonomi uden at miste fokus på gennemsigtighed og sikkerhed i beslutningstagningen.
Hvad er Alpamayo-R1, og hvorfor markerer det et vendepunkt?

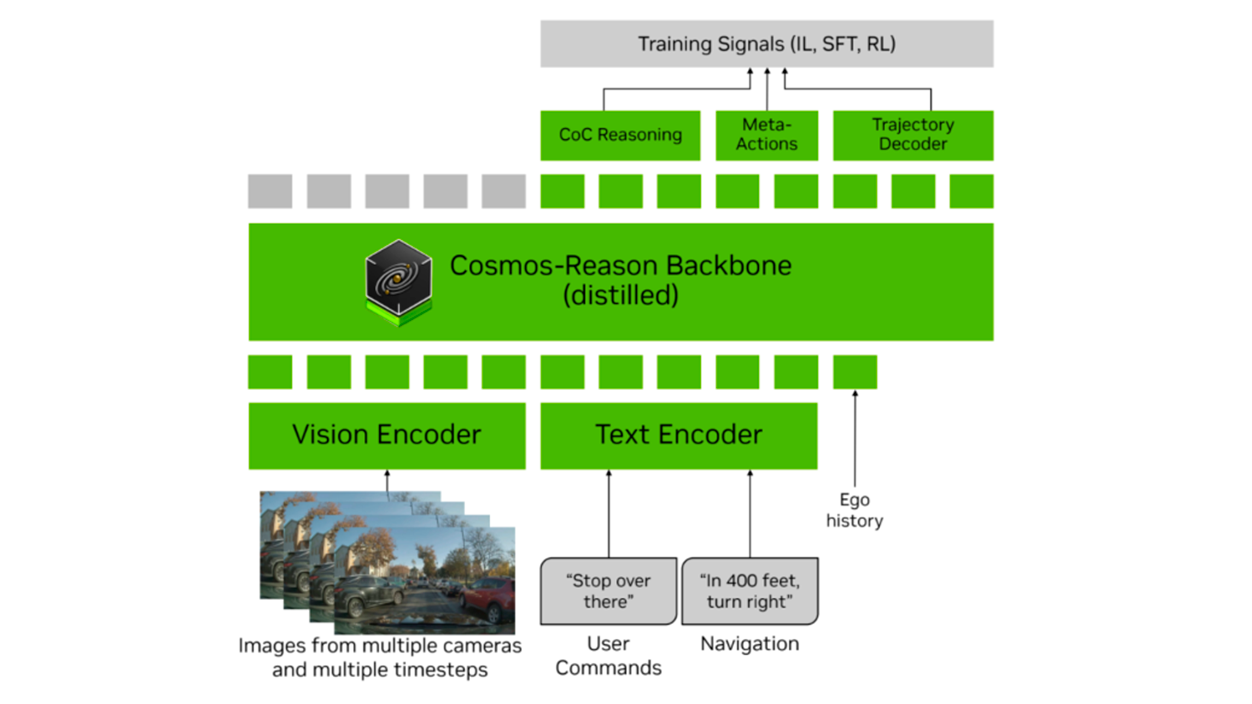
Alpamayo-R1 er en del af en ny generation af AI-modeller, der kombinerer computersyn, naturlig sprogbehandling og konkrete handlingerDenne VLA-tilgang gør det muligt for systemet at modtage visuel information (kameraer, sensorer), beskrive og forklare den i sproget og forbinde den med reelle kørselsbeslutninger, alt sammen inden for samme ræsonnementsflow.
Mens andre modeller for autonom kørsel var begrænset til at reagere på allerede indlærte mønstre, fokuserer AR1 på trinvis ræsonnement eller tankekædeved at integrere det direkte i ruteplanlægningen. Det betyder, at køretøjet mentalt kan nedbryde en kompleks situation, evaluere muligheder og internt begrunde, hvorfor det vælger en bestemt manøvre, hvilket gør det lettere for efterforskere og myndigheder at vurdere.
NVIDIAs satsning med Alpamayo-R1 går ud over at forbedre kontrolalgoritmer: målet er at drive en AI i stand til at forklare sin adfærdDette er især relevant i områder som Den Europæiske Union, hvor sporbarheden af automatiserede beslutninger og teknologisk ansvarlighed inden for transportområdet værdsættes i stigende grad.
AR1 er således ikke blot en avanceret perceptionsmodel, men et værktøj designet til at håndtere den store udfordring ved sikker og menneskevenlig autonom kørselDette er et aspekt, der vil være afgørende for dens faktiske udbredelse på de europæiske veje.
Ræsonnement i virkelige situationer og komplekse miljøer
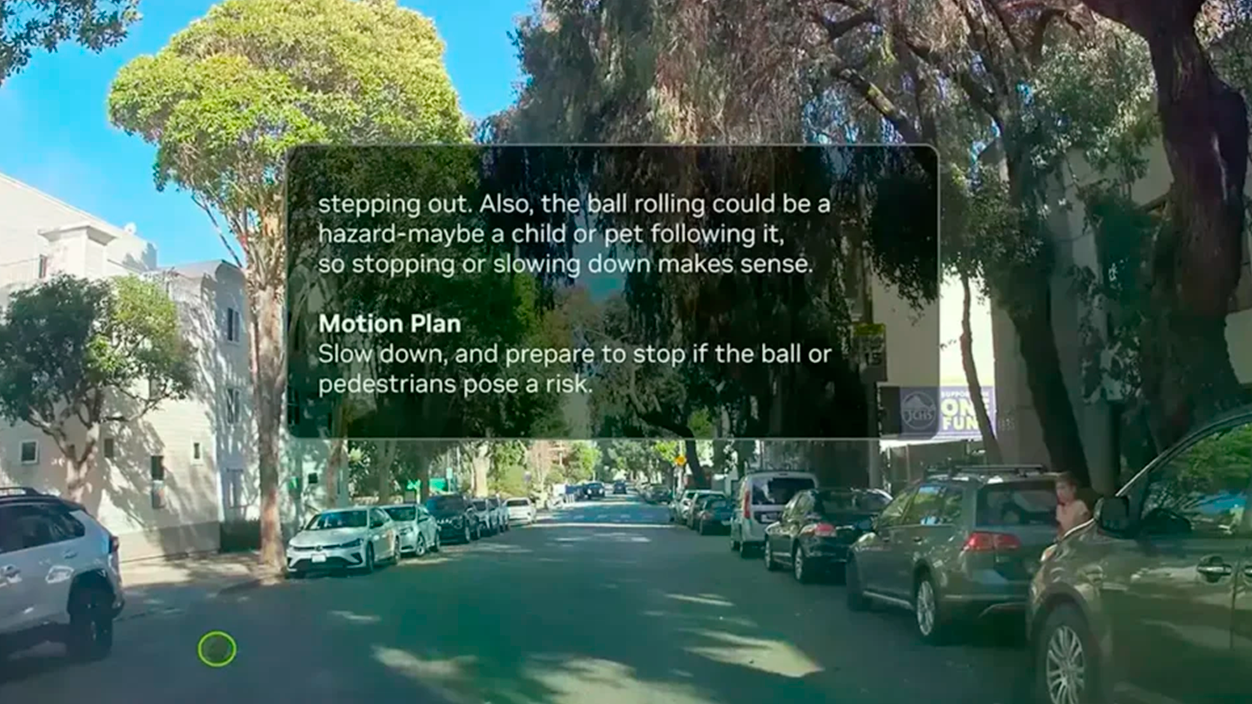
En af styrkerne ved Alpamayo-R1 er dens evne til at håndtere bymiljøer fulde af nuancerhvor tidligere modeller havde en tendens til at have flere problemer. Overgange med fodgængere, der tøvende nærmer sig et fodgængerfelt, dårligt parkerede køretøjer, der optager en del af vejbanen, eller pludselige vejspærringer er eksempler på sammenhænge, hvor simpel objektdetektion ikke er nok.
I disse typer miljøer, AR1 opdeler scenen i små trin i ræsonnementetUnder hensyntagen til fodgængertrafik, andre køretøjers placering, skiltning og elementer som cykelstier eller af- og pålæsningszoner. Derfra, Den evaluerer forskellige mulige veje og vælger den, den anser for at være sikrest og mest passende. i realtid.
Hvis en selvkørende bil for eksempel kører langs en smal europæisk gade med en parallel cykelsti og mange fodgængere, Alpamayo-R1 kan analysere hvert segment af ruten, forklare, hvad den har observeret, og hvordan hver faktor har påvirket dens beslutning. at reducere hastigheden, øge den laterale afstand eller ændre banen en smule.
Dette detaljeringsniveau gør det muligt for forsknings- og udviklingsteams at gennemgå modellens interne ræsonnementDette muliggør identifikation af potentielle fejl eller bias og justering af både træningsdata og kontrolregler. For europæiske byer med deres historiske centre, uregelmæssige gadeplaner og meget varierende trafik er denne fleksibilitet særligt værdifuld.
Desuden åbner denne evne til at begrunde deres valg døren for bedre integration med fremtidige regler. selvkørende køretøjer i Europada det gør det lettere at påvise, at systemet har fulgt en logisk proces og er i overensstemmelse med god trafiksikkerhedspraksis.
Åben model baseret på NVIDIA Cosmos Reason
Et andet karakteristisk aspekt ved Alpamayo-R1 er dens karakter af åben forskningsorienteret modelNVIDIA har bygget det på fundamentet af NVIDIA Cosmos Reason, en platform fokuseret på AI-ræsonnement, der gør det muligt at kombinere forskellige informationskilder og strukturere komplekse beslutningsprocesser.
Takket være dette teknologiske grundlag kan forskere tilpasse AR1 til flere eksperimenter og tests der ikke har direkte kommercielle formål, fra rent akademiske simuleringer til pilotprojekter i samarbejde med universiteter, teknologicentre eller bilproducenter.
Modellen drager især fordel af forstærkningslæringDenne teknik involverer, at systemet forbedrer sin ydeevne gennem guidet trial and error, og modtager belønninger eller sanktioner baseret på kvaliteten af sine beslutninger. Denne tilgang har vist sig at forbedre AR1's ræsonnement. gradvist forbedre deres måde at fortolke trafiksituationer på.
Denne kombination af åben model, struktureret ræsonnement og avanceret træning positionerer Alpamayo-R1 som en attraktiv platform for det europæiske videnskabelige samfund, interesseret i både at studere autonome systemers opførsel og i at udforske nye sikkerhedsstandarder og lovgivningsmæssige rammer.
I praksis gør en tilgængelig model det lettere for teams fra forskellige lande at del resultater, sammenlign tilgange og accelerer innovation inden for selvkørende kørsel, noget der kan resultere i mere robuste standarder for hele det europæiske marked.
Tilgængelighed på GitHub, Hugging Face og åbne data
NVIDIA har bekræftet, at Alpamayo-R1 vil være offentligt tilgængelig via GitHub og Hugging Face.Disse er to af de førende platforme til udvikling og distribution af kunstig intelligens-modeller. Dette skridt giver forsknings- og udviklingsteams, startups og offentlige laboratorier adgang til modellen uden behov for komplekse kommercielle aftaler.
Sammen med modellen vil virksomheden offentliggøre en del af de datasæt, der bruges til dens træning på NVIDIA fysiske AI åbne datasætSamlinger fokuseret på fysiske og drivende scenarier, der er særligt nyttige til at replikere og udvide eksperimenter udført internt.
Denne åbne tilgang kan hjælpe europæiske institutioner, såsom forskningscentre inden for mobilitet eller EU-finansierede projekterIntegrer AR1 i dine tests og sammenlign dens ydeevne med andre systemer. Det vil også gøre det nemmere at tilpasse evalueringsscenarier til trafikforholdene i forskellige lande, herunder Spanien.
Publicering i kendte repositories gør det nemmere for udviklere og forskere at revider modellens adfærd, for at foreslå forbedringer og dele yderligere værktøjer, hvilket styrker gennemsigtigheden på et område, hvor offentlighedens tillid er fundamental.
For den europæiske bilindustri repræsenterer en tilgængelig benchmarkmodel en mulighed for at forenkle evalueringskriterier og teste nye softwarekomponenter til autonom kørsel på et fælles grundlag, hvilket reducerer dobbeltarbejde og fremskynder overgangen fra prototyper til det virkelige miljø.
AlpaSim: Evaluering af AR1-ydeevne i flere scenarier
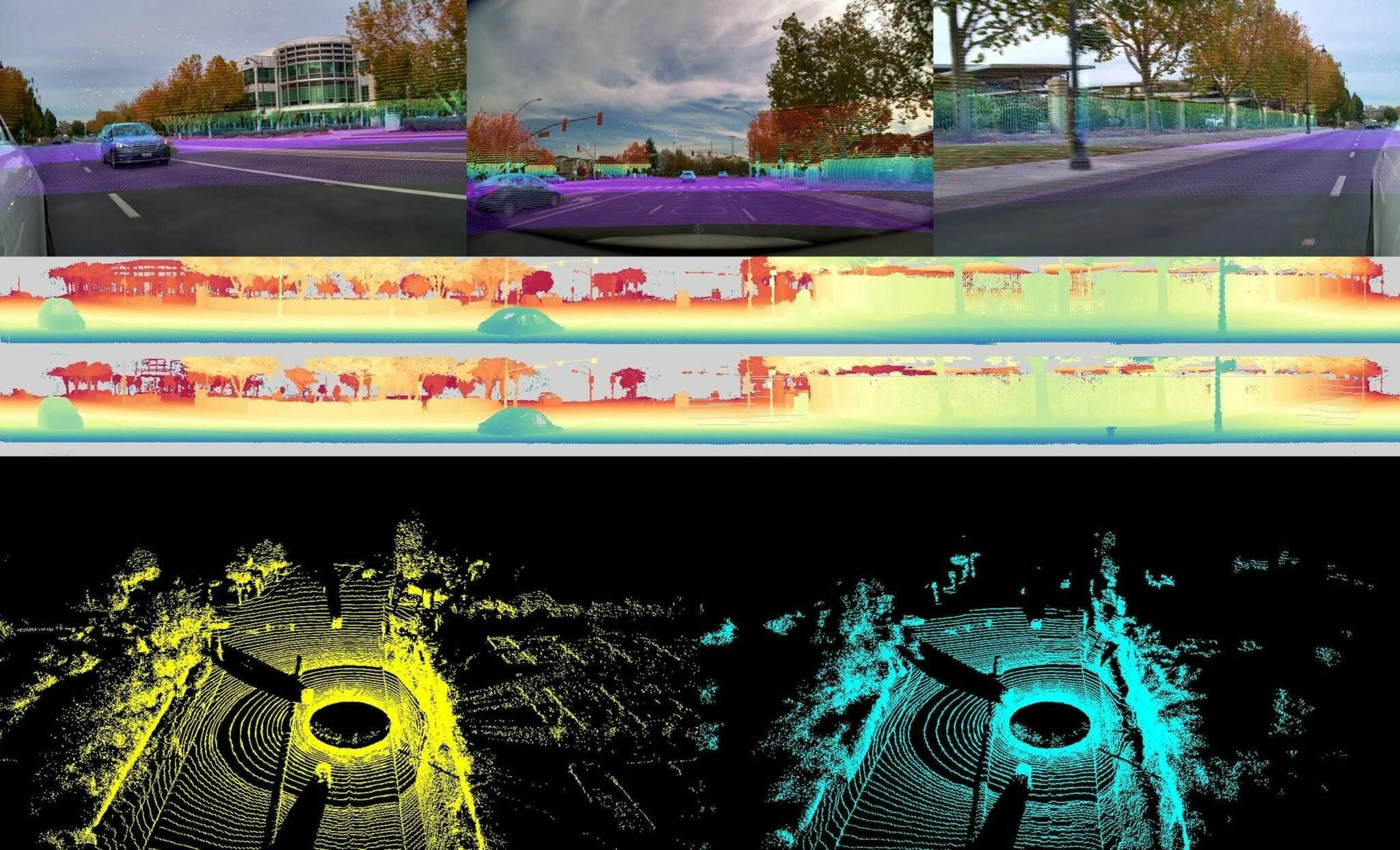
Ved siden af Alpamayo-R1, NVIDIA har præsenteret AlpaSim, en open source-framework skabt til at teste modellen i en bred vifte af sammenhængeIdeen er at have en standardiseret vurderingsværktøj der gør det muligt at sammenligne AR1's opførsel i forskellige trafik-, vejr- og bydesignsituationer.
Med AlpaSim, forskere kan generere syntetiske og realistiske scenarier der efterligner alt fra motorveje med flere spor til typiske rundkørsler i europæiske byer, herunder boligområder med trafikdæmpning eller skolezoner med en høj forekomst af fodgængere.
Rammen Den er designet til at måle både kvantitative målinger (reaktionstid, sikkerhedsafstand, overholdelse af regler) som kvalitativ, relateret til Alpamayo-R1's trinvise argumentation og deres evne til at begrunde, hvorfor de har valgt en bestemt rute eller manøvre.
Denne tilgang gør det lettere for europæiske teams at tilpasse deres tests til EU-lovgivningskravsom normalt kræver detaljeret dokumentation for autonome systemers opførsel i kontrollerede miljøer, før der godkendes test i åbent vejr.
I sidste ende, AlpaSim bliver et naturligt supplement til AR1, da det tilbyder det ideelle miljø for iterere, justere og validere forbedringer af modellen uden at skulle udsætte rigtige brugere for situationer, der endnu ikke er tilstrækkeligt testet.
Kombinationen af åben VLA-model, fysiske datasæt og simuleringsramme Dette placerer NVIDIA i en relevant position i debatten om, hvordan fremtidige autonome køretøjer bør testes og certificeres i Europa og dermed i resten af verden.
Med alle disse elementer fremstår Alpamayo-R1 som en central platform for det videnskabelige samfund og industrien til at udforske nye måder at køre på automatiseret vis og bidrage større gennemsigtighed, analytisk kapacitet og sikkerhed til et felt, der stadig er under regulatorisk og teknologisk udvikling.

Jeg er en teknologientusiast, der har vendt sine "nørde" interesser til et erhverv. Jeg har brugt mere end 10 år af mit liv på at bruge avanceret teknologi og pille ved alle slags programmer af ren nysgerrighed. Nu har jeg specialiseret mig i computerteknologi og videospil. Dette skyldes, at jeg i mere end 5 år har skrevet til forskellige hjemmesider om teknologi og videospil, og lavet artikler, der søger at give dig den information, du har brug for, på et sprog, der er forståeligt for alle.
Har du spørgsmål, så spænder min viden fra alt relateret til Windows styresystemet samt Android til mobiltelefoner. Og mit engagement er over for dig, jeg er altid villig til at bruge et par minutter og hjælpe dig med at løse eventuelle spørgsmål, du måtte have i denne internetverden.