- Una nueva piel electrónica neuromórfica permite a los robots detectar tacto, daño y activar reflejos rápidos similares al dolor.
- La arquitectura inspirada en el sistema nervioso humano evita pasar siempre por la CPU y mejora la seguridad y la velocidad de reacción.
- El sistema ya se ha probado en robots humanoides y abre la puerta a mejores prótesis, exoesqueletos y robots de servicio.
- El uso del término "dolor" en máquinas plantea debates éticos y de lenguaje, aunque los robots no tengan emociones.

La robótica da un paso llamativo con la llegada de una nueva generación de piel electrónica capaz de dotar a las máquinas de un sistema de alerta parecido al dolor humano. No se trata de hacer sufrir a los robots, sino de darles una señal clara y rapidísima de que algo va mal para evitar averías y comportamientos peligrosos cuando trabajan cerca de personas.
En los últimos meses, varios equipos de investigación en Asia han presentado prototipos de “e-skin” neuromórfica o piel neuroelectrónica diseñados para robots humanoides y de servicio. Estas soluciones reproducen, hasta cierto punto, la lógica del sistema nervioso: detectan el tacto, reconocen cuándo un estímulo puede causar daño y desencadenan reflejos instintivos sin depender siempre de un “cerebro” central lento.
Qué significa que un robot pueda sentir algo parecido al «dolor»
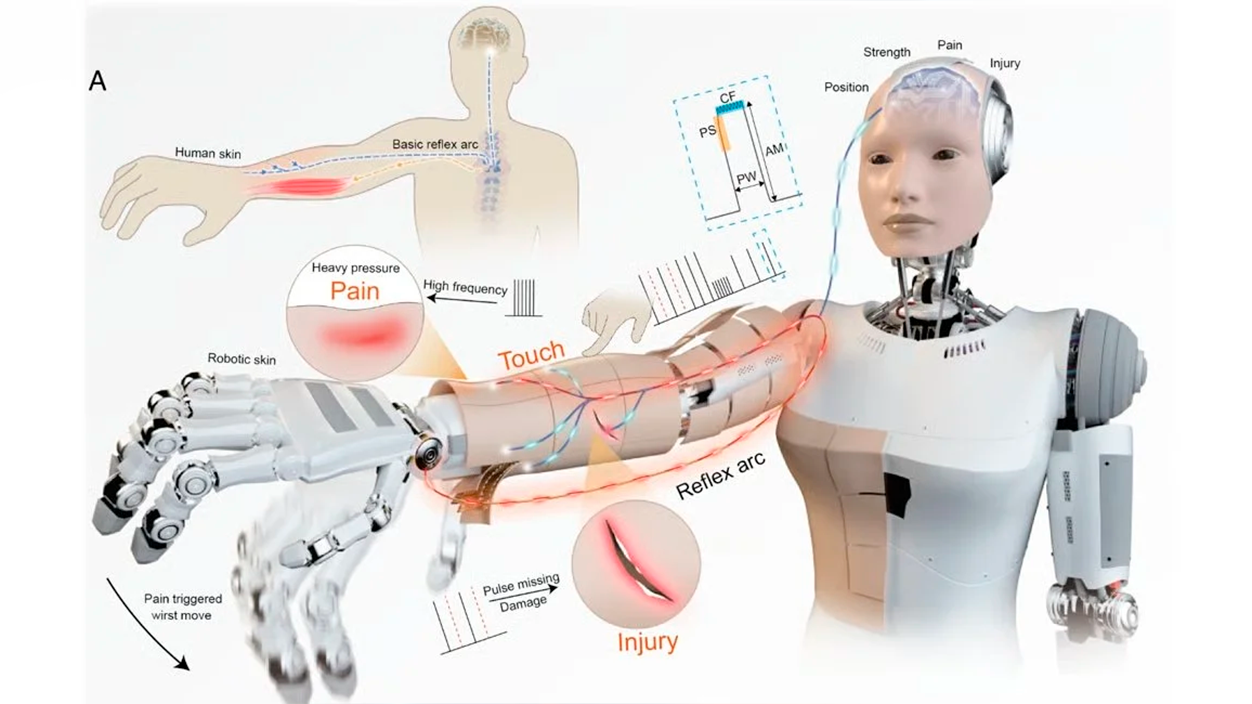
En el laboratorio, los investigadores hablan de centros de “dolor” y estímulos peligrosos para describir cómo responde esta piel artificial a situaciones como calor excesivo, pinchazos, golpes o presiones demasiado fuertes. Cuando la máquina detecta ese tipo de contacto, se activa una señal de emergencia que ordena al robot apartar el brazo o la pierna afectada antes de que se produzca un daño mayor.
Esta reacción no es emocional, ni mucho menos, pero sí se parece a los reflejos humanos: al tocar la espina de una rosa, el cuerpo reacciona antes de que el cerebro procese por completo el dolor. La nueva piel persigue la misma idea en clave robótica, con respuestas muy rápidas que ayudan a proteger motores, juntas y, sobre todo, a las personas que trabajan a su lado.
El uso del término “dolor” genera debate porque puede inducir a pensar que los robots sufren, cuando en realidad lo que hay es una señal técnica de seguridad. Sin embargo, muchos expertos reconocen que este tipo de lenguaje ayuda a explicar de forma sencilla un sistema de alarmas complejo que, al final, mejora la interacción entre humanos y máquinas.
En un contexto en el que los humanoides ya no se quedan solo en fábricas y laboratorios, sino que empiezan a aparecer en almacenes, hospitales, centros logísticos o incluso hogares, contar con una piel sensible al peligro deja de ser ciencia ficción para convertirse en una necesidad práctica.
Una arquitectura inspirada en el sistema nervioso humano

La gran diferencia respecto a las pieles electrónicas tradicionales está en su arquitectura neuromórfica y jerárquica. En lugar de enviar todos los datos de presión, temperatura o contacto a una CPU central para que los analice con calma, esta piel replica el flujo de información del sistema nervioso humano, donde muchos reflejos se resuelven antes de llegar al cerebro.
El diseño se compone, en líneas generales, de cuatro capas superpuestas. La externa actúa como una especie de epidermis sintética protectora, pensada para soportar golpes, rozaduras y el desgaste del trabajo diario. Debajo se sitúan las capas con sensores y circuitos que cumplen el papel de nervios sensoriales y vías de señalización.
Estos sensores miden de manera constante la presión, la fuerza ejercida y la integridad de la propia piel, vinculada a la fabricación de sensores neuromórficos. Cada cierto tiempo, el sistema envía pequeños impulsos eléctricos a la unidad de procesamiento como señal de que todo sigue en orden. Si se produce un corte o una rotura, esos impulsos desaparecen en la sección afectada, lo que permite localizar de forma rápida dónde está el daño.
Cuando la piel entra en contacto con otra superficie, genera picos eléctricos que codifican la información sobre el tacto: la intensidad del contacto, la distribución de la presión o si se trata de un estímulo puntual o difuso. Todo esto ayuda al robot a reconocer objetos y ajustar la fuerza con la que los agarra, algo clave si manipula piezas frágiles o interactúa con pacientes.
La novedad llega cuando el estímulo excede ciertos umbrales de seguridad. En ese caso, el sistema cambia de ruta: en lugar de pasar por la CPU, se envía un pulso de mayor voltaje directamente a los motores del robot para desencadenar un movimiento reflejo inmediato, por ejemplo retirar un brazo sometido a una presión peligrosa o reorientar una pierna si detecta un impacto fuerte.
Del laboratorio a los robots humanoides y prótesis

Buena parte de estos avances se ha probado ya en robots humanoides equipados con brazos, manos y piernas articuladas. La idea es que puedan realizar tareas complejas -desde doblar ropa hasta cocinar o tocar un instrumento- sin poner en riesgo ni a las personas ni a sí mismos cuando algo inesperado ocurre.
Hasta ahora, muchos robots dependen por completo de su unidad de procesamiento central para interpretar cada contacto. Eso supone un cuello de botella: cualquier error de cálculo o milisegundo extra puede desembocar en golpes fuertes, caídas o agarres inadecuados. Con esta nueva piel, una parte de las decisiones se resuelve casi “en automático”, lo que se traduce en menos accidentes y menos averías.
El potencial no se queda solo en la robótica industrial o de servicio. Esta tecnología tiene un vínculo directo con el desarrollo de prótesis avanzadas y exoesqueletos. Un sistema que distinga con precisión la textura, la presión y el daño puede mejorar el llamado feedback háptico, esa sensación de “sentir” lo que se toca a través de una mano o pierna artificial.
En Europa, donde se impulsan proyectos de robótica colaborativa en fábricas, hospitales y centros de rehabilitación, se mira con atención a estas pieles electrónicas como un posible complemento a los estándares de seguridad ya existentes. La integración con normativas europeas podría acelerar su llegada a dispositivos médicos y robots de apoyo.
Además, al ser una tecnología pensada para ser robusta, escalable y relativamente barata, no se limita a los grandes humanoides. En un futuro, podría llegar también a dispositivos mucho más cotidianos, desde aspiradoras robot capaces de “notar” cuándo están dañando un mueble hasta pequeños asistentes personales más delicados al tratar con personas mayores o con movilidad reducida.
Cómo se construye y se mantiene esta nueva piel sintética
Para acercarse al comportamiento de la piel humana, los investigadores han diseñado un sistema en módulos. En lugar de un gran recubrimiento único que resultaría complicado de reparar, se recurre a parches independientes que se fijan mediante elementos magnéticos. Si una zona sufre un corte o deja de funcionar, se puede sustituir ese tramo sin desmontar todo el robot.
Cada parche integra sensores y circuitos capaces de monitorear de forma permanente la presión, la fuerza y el estado estructural. Esos módulos cubren brazos, torso, manos o piernas según las necesidades del robot. La modularidad facilita adaptar la piel a perfiles diferentes: no será lo mismo forrar un brazo industrial que se enfrenta a golpes constantes que una mano diseñada para manipular instrumental médico.
El sistema de auto-chequeo periódico -los famosos impulsos eléctricos que se envían cada pocos segundos- se ha planteado como una herramienta clave de mantenimiento preventivo. Si deja de recibirse señal en una zona, el propio robot puede avisar de que esa sección está dañada y requerir intervención, reduciendo el tiempo de parada por mantenimiento.
Los equipos responsables del desarrollo trabajan ahora en aumentar la sensibilidad global. El reto es que la piel pueda procesar múltiples puntos de contacto simultáneos sin saturarse, reconociendo patrones complejos, por ejemplo cuando alguien se apoya en el cuerpo del robot o cuando este tiene que moverse en espacios muy estrechos.
Junto a la dureza mecánica y la facilidad de reparación, otro de los objetivos es compatibilizar esta piel con diferentes tipos de recubrimientos estéticos, de modo que se pueda mantener un aspecto agradable o más humano sin perder prestaciones técnicas. Esto resulta importante en entornos de atención sanitaria o cuidado a mayores, donde la percepción social de la máquina cuenta casi tanto como su rendimiento.
Seguridad, lenguaje y ética: por qué las palabras importan
El avance de la piel neuromórfica se produce al mismo tiempo que crece la preocupación por la seguridad en la interacción persona-robot. Incidentes registrados en redes sociales -como vídeos en los que un robot humanoide reproduce un movimiento humano que termina causando un golpe doloroso a su operador– recuerdan que estas máquinas aún no comprenden el contexto ni la ética de sus actos.
En muchos casos, los humanoides comerciales simplemente imitan en tiempo casi real los datos de movimiento que reciben, sin distinguir si un gesto es inocuo o peligroso. De ahí que la combinación de mejores “pieles” con capas adicionales de control y límites de fuerza resulte clave para reducir riesgos, tanto en laboratorios como en espacios de trabajo reales.
El diseño neuronal jerárquico de la nueva piel busca precisamente aportar una capa extra de protección frente a impactos, cortes o presiones excesivas. Al provocar un reflejo rápido, el sistema ayuda a evitar situaciones en las que un robot podría seguir empujando o golpeando sin darse “cuenta” del daño que está causando.
Al mismo tiempo, el uso del término “dolor” para explicar estas funciones ha abierto un debate ético y comunicativo. Algunos especialistas alertan de que atribuir rasgos humanos a máquinas puede llevar a confusión, alimentando la idea de que los robots sienten o sufren como nosotros, algo que no se corresponde con la realidad.
La mayoría de los investigadores insiste en remarcar que se trata de una señal técnica, un mecanismo de alarma inteligente, útil para hacer las máquinas más seguras y eficaces, pero sin componente emocional. La clave, coinciden, está en usar un lenguaje que sea didáctico sin llevar a equívocos, especialmente ahora que estos sistemas están cada vez más presentes en la vida cotidiana.
La irrupción de estas pieles electrónicas neuromórficas acerca a los robots a un comportamiento físico más parecido al humano en cuanto a reflejos y protección ante el daño. Al combinar detección de tacto, reconocimiento de peligro y respuesta ultrarrápida, estos sistemas prometen reducir accidentes, abaratar averías y mejorar la convivencia entre personas y máquinas en fábricas, almacenes, hospitales y hogares. Queda camino por recorrer en sensibilidad, regulación y ética del lenguaje, pero la idea de que los robots cuenten con su propio “sentido del dolor” está dejando de ser un concepto futurista para convertirse en una herramienta práctica de seguridad y fiabilidad.
Soy un apasionado de la tecnología que ha convertido sus intereses «frikis» en profesión. Llevo más de 10 años de mi vida utilizando tecnología de vanguardia y trasteando todo tipo de programas por pura curiosidad. Ahora me he especializado en tecnología de ordenador y videojuegos. Esto es por que desde hace más de 5 años que trabajo redactando para varias webs en materia de tecnología y videojuegos, creando artículos que buscan darte la información que necesitas con un lenguaje entendible por todos.
Si tienes cualquier pregunta, mis conocimientos van desde todo lo relacionado con el sistema operativo Windows así como Android para móviles. Y es que mi compromiso es contigo, siempre estoy dispuesto a dedicarte unos minutos y ayudarte a resolver cualquier duda que tengas en este mundo de internet.