- Alpamayo-R1 是首個以自動駕駛車輛為導向的視覺-語言-動作 VLA 模型。
- 將逐步推理融入路線規劃,以應對複雜場景。
- 這是一個基於 NVIDIA Cosmos Reason 的開放模型,可在 GitHub 和 Hugging Face 上取得。
- AlpaSim 和 Physical AI Open Datasets 加強了 AR1 的驗證和實驗。

隨著…的到來,自動駕駛生態系統向前邁進了一步。 阿爾帕馬約-R1 (AR1) 公路這是一種人工智慧模型,旨在使車輛不僅「看到」環境,而且能夠理解環境並採取相應的行動。 英偉達的這項新進展 它被定位為行業標桿,尤其是在某些市場。 歐洲和西班牙在這些地方,法規和道路安全要求尤其嚴格。
NVIDIA的這項新進展被描述為: 第一個VLA模型(視覺-語言-動作) 開放式推理特別關注 自動駕駛汽車研究Alpamayo-R1 不僅僅是處理感測器數據,它還融入了結構化推理能力,這對於在不忽視決策的透明度和安全性的前提下,邁向更高層次的自主性至關重要。
Alpamayo-R1是什麼?為什麼它標誌著一個轉折點?

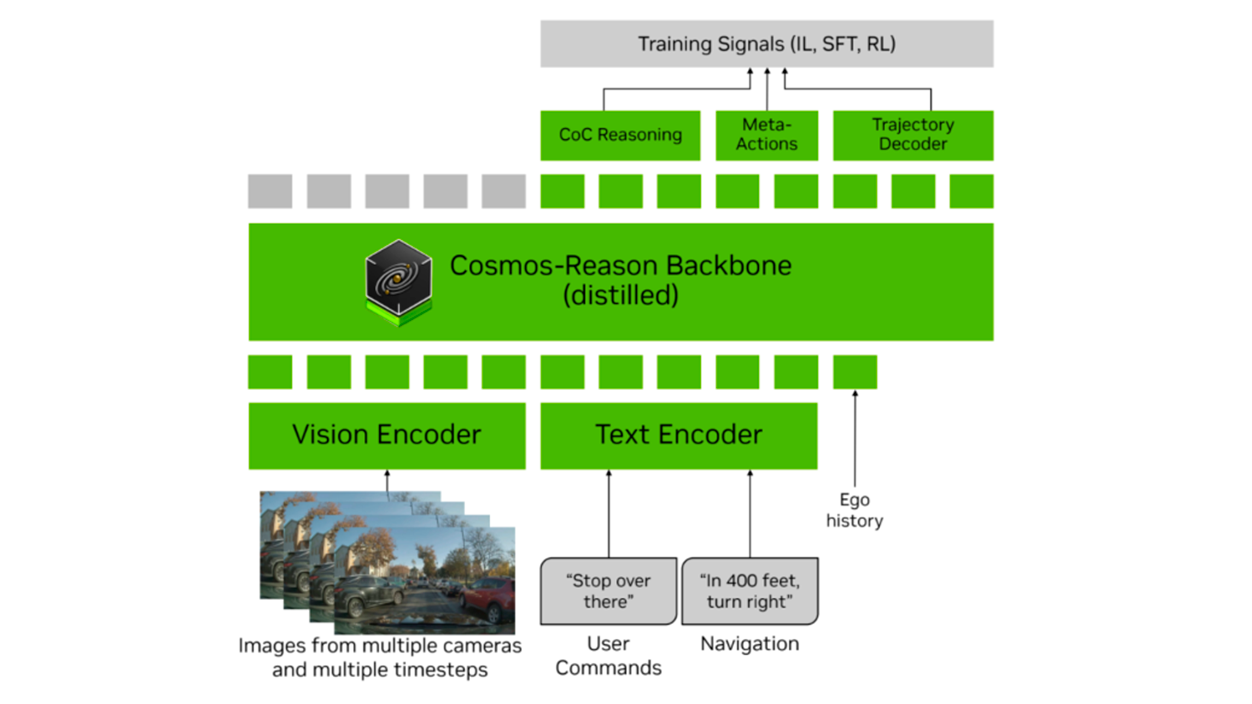
Alpamayo-R1 是新一代人工智慧模型的一部分,它結合了多種技術。 電腦視覺、自然語言處理與具體行動這種 VLA 方法允許系統接收視覺訊息(攝影機、感測器),用語言描述和解釋它,並將其與實際駕駛決策聯繫起來,所有這些都在同一個推理流程中完成。
其他自動駕駛模型僅限於對已學習到的模式做出反應,而AR1則專注於… 逐步推理或思路鏈將其直接整合到路線規劃中。這意味著車輛可以對複雜情況進行邏輯分析,評估各種方案,並從內部解釋其選擇特定操作的原因,使調查人員和監管機構更容易進行評估。
NVIDIA 對 Alpamayo-R1 的投入不僅在於改進控制演算法:其目標是推動… 能夠解釋自身行為的人工智慧這一點在歐盟等地區尤其重要,因為在這些地區,自動化決策的可追溯性和交通領域的技術責任越來越受到重視。
因此,AR1 不僅僅是一個先進的感知模型,更是一個旨在應對以下巨大挑戰的工具: 安全且人性化的自動駕駛這一點對於它能否真正應用於歐洲道路上至關重要。
在現實生活情境和複雜環境中進行推理
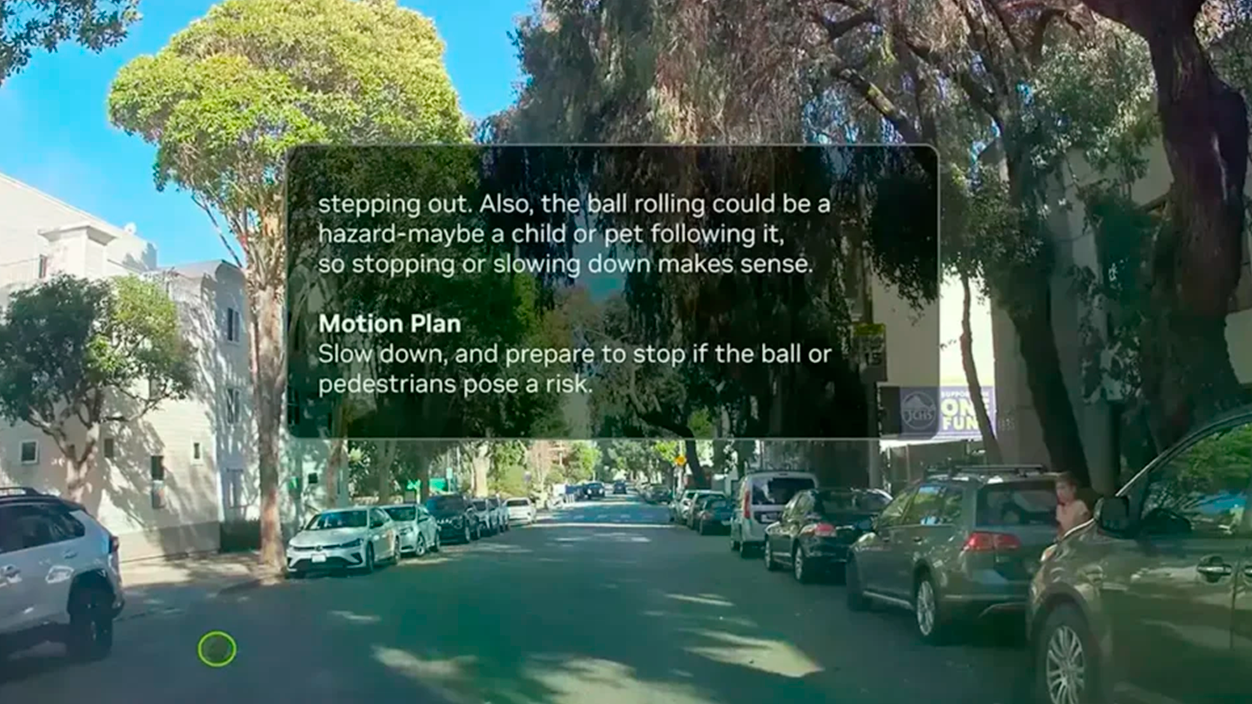
Alpamayo-R1 的優點之一是它的 處理能力 充滿細微差別的都市環境以往的模型往往有更多問題。例如,行人猶豫地接近行人穿越道、車輛隨意停放佔據部分車道,或道路突然封閉等情況,簡單的目標偵測就不足以應付。
在這類環境中, AR1 將場景分解成 小步推理考慮行人流動、其他車輛位置、標誌牌以及自行車道或裝卸區等因素。由此出發, 它會評估不同的可能路徑,並選擇它認為最安全、最適合的路徑。 en tiempo真實。
例如,如果一輛自動駕駛汽車行駛在歐洲一條狹窄的街道上,街道旁有一條自行車道,行人眾多, Alpamayo-R1 可以分析路線的每個路段,解釋它觀察到的情況,以及每個因素如何影響它的決策。 降低速度、增加橫向距離或稍微改變軌跡。
這種程度的細節使研發團隊能夠審查… 模型內部推理這有助於識別潛在的誤差或偏差,並調整訓練資料和控制規則。對於擁有歷史中心、街道佈局不規則且交通狀況變化極大的歐洲城市而言,這種彈性尤其重要。
此外,這種證明自身選擇合理性的能力,為更好地融入未來的法規打開了大門。 歐洲的自動駕駛汽車因為這樣更容易證明系統遵循了合乎邏輯的流程,並且符合良好的道路安全規範。
基於 NVIDIA Cosmos Reason 的開放模型
Alpamayo-R1 的另一個顯著特徵是其特性 開放的研究導向模式NVIDIA 將其建構於以下基礎: NVIDIA Cosmos Reason一個專注於人工智慧推理的平台,可以結合不同的資訊來源並建立複雜的決策過程。
由於這項技術基礎,研究人員可以 將 AR1 應用於多個實驗和測試 這些研究不具有直接的商業目的,從純粹的學術模擬到與大學、技術中心或汽車製造商合作的試點計畫。
該模型尤其受益於 強化學習這項技術透過引導式試誤來提升系統性能,並根據決策品質給予獎勵或懲罰。研究表明,這種方法能夠增強AR1的推理能力。 他們不斷改進對交通狀況的解讀方式.
Alpamayo-R1 結合了開放模型、結構化推理和高級訓練,使其成為一種 對歐洲科學界來說,這是一個極具吸引力的平台對研究自主系統的行為以及探索新的安全標準和監管框架都感興趣。
實際上,擁有一個易於訪問的模型可以讓來自不同國家的團隊更容易… 分享成果、比較方法、加速創新 在自動駕駛領域,這可以轉化為整個歐洲市場更強大的標準。
可在 GitHub、Hugging Face 和開放資料上獲取
NVIDIA 已確認 Alpamayo-R1 將透過 GitHub 和 Hugging Face 公開提供。這兩個平台是開發和分發人工智慧模型的兩大領先平台。此舉使得研發團隊、新創公司和公共實驗室無需簽訂複雜的商業協議即可存取這些模型。
除了模型之外,該公司還將公佈用於模型訓練的部分資料集。 NVIDIA 實體 AI 開放資料集專注於實體和駕駛場景的集合,對於複製和擴展內部進行的實驗特別有用。
這種開放的態度可以幫助歐洲機構,例如 流動性研究中心或歐盟資助項目將 AR1 整合到您的測試中,並將其性能與其他系統進行比較。這將有助於您根據不同國家(包括西班牙)的交通特徵調整評估方案。
在廣為人知的儲存庫中發佈內容,可以讓開發者和科學家更容易… 審核模型的行為提出改進建議並分享更多工具,以加強公眾信任至關重要的領域的透明度。
對於歐洲汽車產業而言,擁有一個易於使用的標竿車型代表著一個機會。 統一評價標準 並以統一的方式測試新的自動駕駛軟體組件,減少重複工作,並加快從原型到真實環境的過渡。
AlpaSim:評估 AR1 在多種場景下的表現
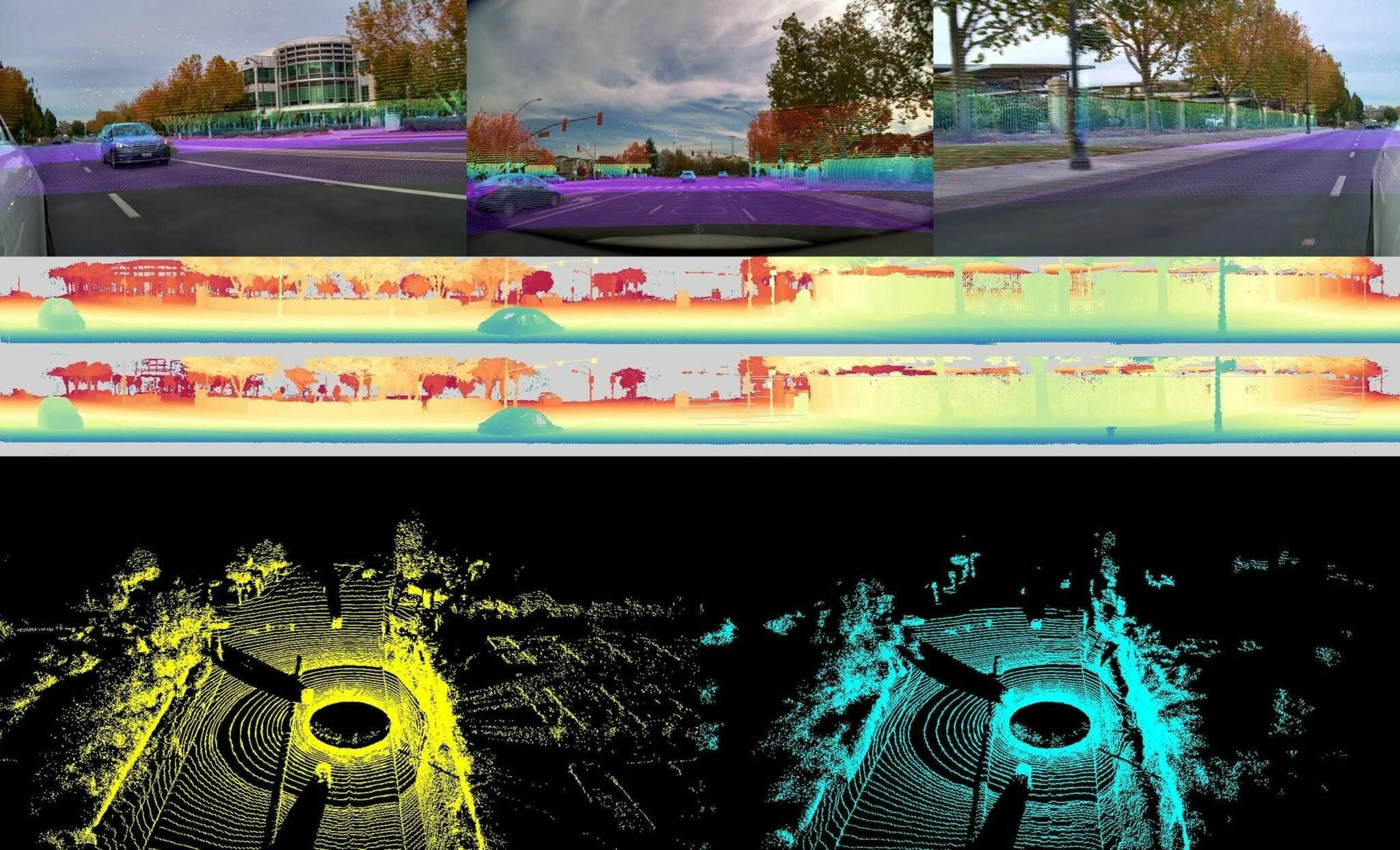
與 Alpamayo-R1 一起, 英偉達已發布 AlpaSim一 這是一個開源框架,旨在測試模型在各種不同環境下的效能。這個想法是擁有一個 標準化評估工具 這樣就可以比較 AR1 在不同的交通、天氣和城市設計情況下的表現。
使用 AlpaSim, 研究者可以生成 合成和真實場景 這些模擬場景涵蓋了從多車道高速公路到歐洲城市典型環島的一切,包括設有交通緩行措施的住宅區或行人密集的學校區域。
框架 它旨在衡量定量指標。 (反應時間、安全距離、遵守規定) 作為定性與……有關 Alpamayo-R1 的逐步推理 以及他們解釋為何選擇特定路線或策略的能力。
這種方法使歐洲球隊更容易使其測試與…保持一致。 歐盟監管要求通常情況下,在批准進行公開道路測試之前,需要提供自主系統在受控環境下行為的詳細證據。
最終, AlpaSim 成為 AR1 的自然補充。因為它為…提供了理想的環境 迭代、調整和驗證 在無需讓真實用戶接觸尚未充分測試的情況的情況下,對模型進行改進。
的結合 開放式VLA模型、實體資料集與模擬框架 這使得英偉達在關於未來自動駕駛汽車應如何在歐洲乃至世界其他地區進行測試和認證的辯論中佔據了重要的地位。
憑藉所有這些要素,Alpamayo-R1 正在成為科學界和工業界探索自動駕駛新方式的關鍵平台,並做出貢獻。 更高的透明度、分析能力和安全性 進入一個仍在監管和技術發展中的領域。

我是一名技術愛好者,已將自己的“極客”興趣變成了職業。出於純粹的好奇心,我花了 10 多年的時間使用尖端技術並修改各種程序。現在我專攻電腦技術和電玩遊戲。這是因為五年多來,我一直在為各種技術和視頻遊戲網站撰寫文章,力求以每個人都能理解的語言為您提供所需的資訊。
如果您有任何疑問,我的知識範圍涵蓋與 Windows 作業系統以及手機 Android 相關的所有內容。我對您的承諾是,我總是願意花幾分鐘幫助您解決在這個網路世界中可能遇到的任何問題。